Load Sensing
Objectif
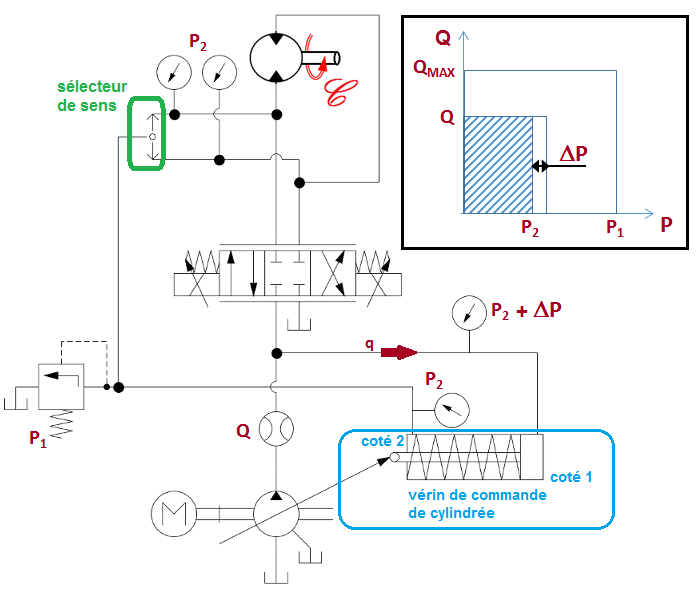
On veut commander un actionneur avec un débit régulé Q en utilisant un distributeur proportionnel. Si la charge entraînée par cet actionneur lui impose une pression P2 ,on veut :
que le débit produit par la pompe s'ajuste à la valeur Q,
que la pression du fluide en sortie de la pompe s'ajuste sur la valeur P2 + ΔP (ΔP correspondant à la différence de pression à maintenir constante sur le distributeur) ,
que cette pression soit limitée à une valeur P1 + ΔP.
Principe
Ce système doit utiliser une pompe à cylindrée variable. Les principes de commande de la cylindrée diffèrent en fonction des constructeurs.
Le schéma ci-contre présente un des principes les plus simples permettant une adaptation de la charge. Il consiste à utiliser une balance de pression à 3 voies et à exploiter le débit excédentaire de la pompe pour commander la réduction de sa cylindrée. Le vérin de commande de cylindrée est équipé d'un ressort avec un tarage correspondant au ΔP à maintenir constant sur le distributeur pour assurer la régulation du débit.
détail du fonctionnement
Au départ : le distributeur est en position repos.
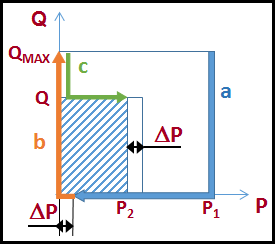
Lors du démarrage de la pompe, la pression de refoulement P augmente. Cette pression P s'appliquant coté 1 du vérin de commande de cylindrée, la tige du vérin se déplace vers la gauche. La cylindrée diminue donc jusqu'à Cy = 0 et donc débit Q = 0. (parcours a sur le graphique). Tant qu'il n'y a pas de besoin, la pompe est donc débrayée.
Le distributeur s'ouvre. A l'ouverture du distributeur, la pression P de refoulement s'annule (coté 1 du vérin aussi). Cela provoque un recalage de la pompe à la cylindrée maximale : Cy = Cy,MAX. (parcours b sur le graphique).
Le distributeur proportionnel est ouvert. La position du tiroir est commandée pour réguler un débit assurant la vitesse souhaitée sur le moteur hydraulique. Il ne laisse passer qu'une partie du débit Q de la pompe. Le débit excédentaire q alimente alors le coté 1 du vérin de commande de cylindrée. La cylindrée Cy de la pompe diminue alors jusqu'à ce que le piston soit en équilibre sous l'action de :
la pression P2 due à la charge, augmentée de la valeur ΔP due au tarage du ressort coté 2 du vérin,
la pression P2 + ΔP en amont du distributeur coté 1 du vérin.
La cylindrée de la pompe est alors réglée pour un débit Q qui traverse entièrement le distributeur vers l'actionneur.
Si le couple C sur l'arbre du moteur hydraulique varie. La cylindrée de la pompe va varier pour compenser le phénomène de compressibilité du fluide.
Par exemple, si le couple C augmente, alors la pression P2 due à cette charge augmente. La cylindrée augmente alors sous l'action du piston du vérin de commande qui se déplace vers la droite sous l'action de cette augmentation de P2 jusqu'à ce que la perte de charge au bornes du distributeur se stabilise sur la valeur de tarage du ressort.
Le débit à l'aspiration de la pompe augmente donc pour compenser le phénomène de compressibilité du fluide. Cela permet de maintenir une vitesse de rotation constante de l'arbre du moteur hydraulique malgré cette augmentation de pression.
L'énergie consommée s'adapte au besoin du circuit.
Exemple : La vidéo suivante montre cette auto-adaptation pour un circuit simple comportant un moteur hydraulique.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.