Régulation de puissance (ou de couple) : régulateur hyperbolique
Principe
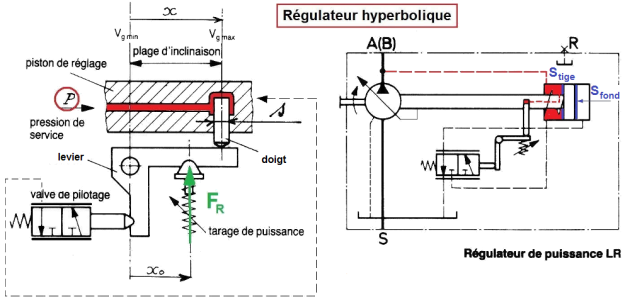
La variation de cylindrée est obtenue par un piston de type différentiel : la section coté tige et très inférieure à la section coté fond (Sf << St). Ce piston entraîne dans son déplacement un doigt de section Sd qui appui sur un levier d'une balance (principe de Roberval). Cette balance commande un distributeur qui alimente le déplacement du piston différentiel.
Détail du fonctionnement
On fait les hypothèses suivantes :
la cylindrée Cy est proportionnelle à la position x du doigt : Cy = kc . x .
la force de tarage du ressort de la balance est Fr.
L'angle de pivotement du levier étant très faible, on peut considérer que l'effort Fr délivré par le ressort est constant.
L'équilibre du levier s'écrit : P . Sd . x = Fr. x0 ( = constante) avec x = Cy / kc . On obtient donc :
Si la pression P augmente, le levier commande le déplacement du tiroir du distributeur vers la gauche. Le vérin de commande est alors alimenté coté fond et le piston se déplace vers la gauche. La cylindrée Cy diminue alors jusqu'à ce que la valeur x permette de retrouver un équilibre avec le tarage du ressort.
Pour faire varier le produit P.Cy représentatif du couple de la pompe, il suffit de faire varier le tarage du ressort Fr.