Formes de présence avec les robots humanoïdes ?
À partir de quelques chorégraphies des robots Nao et Asimo Presences with humanoid robots?
From some Nao and Asimo’s choregraphies
Le terme-clé pour parler de l’interaction homme-robot humanoïde, est celui de la « présence » : être en relation avec l’autre, c’est au moins prioritairement lui être présent d’une certaine manière, face à lui, avec lui, contre lui, derrière lui, en dessous de lui, au-dessus de lui, etc., autrement dit, l’ensemble des biais topologiques que nous savons imaginer à ce jour.
Sans devoir obligatoirement établir de typologie, et en suivant les réflexions théoriques menées sur la question, nous partons de ces biais topologiques pour voir ce qui est ici en jeu. Deux cas-typiques au moins sont à envisager, l’un régulé par un principe de présence-absence, l’autre par un principe de coprésence. Quelles en sont les déterminations ? Telle est notre démarche.
When discussing the interaction between humans and humanoid robots, we often refer to the notion of “presence”. In order to be in a relationship with another, the other must, a priori, be present. In other words, the subject with which we engage must be either in front of, with, against, behind, below, above of us. It is the nature of placement, topology, that allows us to speak of presence. By studying topology, we will be better suited to understanding what is at stake in theoretical reflections. There are two typical cases to consider, one regulated by a principle presence-absence, the other by a principle of copresence. Our approach seeks to identify what determines these two types of relations.
L’essentiel est sans cesse menacé par l’insignifiant
René Char
1. Introduction
Une des conditions pour agir avec le robot humanoïde est la capacité à cerner les points d’articulation qui, dans sa constitution, en font un dispositif à même de comportements prédictibles par l’humain. Deux contraintes contradictoires apparaissent d’entrée. D’une part, l’attente de conduites aléatoires de la part du robot, ou alors il ne s’agirait que d’un automate prévisible, défini par une série de tâches achevées, pour des réponses, elles aussi achevées : l’interaction ne serait alors que le seul fait d’une programmation rigide et itérative ; d’autre part, la manifestation effective de faits de standardisation, pour envisager les préalables nécessaires qui aideraient à établir les fondements des mouvements en question dans ces comportements, faute de quoi nous n’aurons affaire qu’à une série de comportements incontrôlables, au mieux hétérogènes. En effet, il s’agit d’imaginer désormais de quelle manière et dans quelles conditions entrevoir une relation sensible avec le robot humanoïde. Tel sera notre point de départ.
On pourrait s’appuyer sur les considérations d’Erwin Goffman pour souligner ce qui est ici en question. Il s’agit d’imaginer la possibilité d’une « éthologie » du robot humanoïde. Dans quelle mesure et de quel point de vue est-il capable d’une relation sensible avec l’homme ? Et préalablement, qu’entend-on par relation sensible ?
Notre hypothèse pourrait trouver sa justification dans l’épisode suivant, décrit par Yves Winkin (2005), à propos de son expérience scientifique avec Erwin Goffman, lorsque celui-ci l’envoya suivre le cours d’éthologie de W. John Smith au zoo de Philadelphie. Les observations qu’il effectua au cours de ce séjour lui permirent de cerner la rationalité profonde des mouvements incessants et incontrôlables au premier abord de singes enfermés dans un enclos. Voici ce qu’il en dit :
L’exercice, au départ fastidieux, est devenu progressivement assez fascinant, parce qu’une relative capacité à prédire leur comportement s’est développée au fil des semaines, sur la base d’un repérage des « points d’articulation » de leurs conduites, qui sont bien moins erratiques qu’une observation superficielle le laisserait croire.
Les observations d’Yves Winkin deviennent plus dialectiques quand il entreprend de les rapporter à ce qu’on a tendance à décrire parfois trop rapidement comme « intentionnalité du comportement » et qui pour Goffman n’en est pas. L’exemple qu’il donne en guise d’illustration est l’ensemble des mouvements, au final, génériques, qui précèdent l’envol de l’oiseau. Voici son argument, extrait de l’article « Ritualisation » (McFarland) du dictionnaire du comportement animal :
Avant de prendre son envol, l’oiseau se ramasse, plie ses pattes, ramène sa tête en arrière, lève la queue puis il prend son élan, étend la tête et les pattes, abaisse la queue et s’envole. La première phase peut être considérée comme une série de mouvements d’intention qui peuvent être répétés plusieurs fois tant que l’oiseau hésite à s’envoler (ibidem).
Inutile d’engager des commentaires supplémentaires, ce qui est décrit ici correspond très précisément à ce qu’en sémiotique et que déjà en philosophie avec Foucault (1994 [1977], 298-329), on appelle un dispositif, c’est-à-dire tout réseau établi entre un ensemble hétérogène d’éléments. Ce n’est pas chaque mouvement pris en soi qui intéresse, encore moins leur pluralité, c’est leur articulation, telle qu’organisée en une structure coordonnée et récursive. Mais la part définitionnelle qui nous intéresse expressément est celle de son élaboration. Il faut, d’emblée, identifier ce en quoi et ce par quoi se réalise une pure activité.
2. Le Dispositif
- Note de bas de page 1 :
-
Mais, ainsi que nous le suggère notre cher ami Vivien Lloveria, lecteur très attentif, nous aurions pu opter aussi pour une définition plus prudente, en tout cas moins pessimiste que celle que nous avons retenue, laquelle renvoie à la définition très restrictive de Foucault, qui associe un peu trop systématiquement dispositif et prison, avec le dispositif comme « entrave de la liberté ». Vivien Lloveria nous suggère la définition suivante de Jacquinot-Delaunay et Laurence Monnoyer (« Avant propos : Il était une fois », Paris, Hermès n°25 : « Le dispositif s’entend, comme chacun sait, c’est-à-dire comme le rappelle le dictionnaire dans une acception prioritairement technique, comme un « ensemble de pièces constituant un mécanisme, un appareil quelconque ». Puis d’englober, par extension, tout agencement d’éléments humains ou matériels, réalisé en fonction d’un but à atteindre » p. 10.
Pour emprunter à la lecture qu’en fait Giorgio Agamben, il s’agirait, pour chaque comportement, de la praxis ad’hoc qui permet de le gouverner, de le contrôler, de l’orienter. On attend par exemple d’un robot humanoïde, simple mécanique à l’apparence humaine, qu’il manifeste un comportement qui simule ce que, schématiquement, un être humain pourrait faire, servir à boire, taper sur un ballon, se relever, etc. Voici une des définitions les plus fortes qu’en donne Agamben dans son essai Qu’est-ce que le dispositif ? (Agamben, 2007) : « J’appelle dispositif tout ce qui a, d’une manière ou d’une autre, la capacité de capturer, d’orienter, de déterminer, d’intercepter, de modeler, de contrôler les gestes, les conduites, les opinions et les discours des êtres vivants » (Idem, 74). En somme, il s’agit de formes ritualisées, c’est-à-dire de formes récurrentes dont la justification principale est de marquer les séquences qu’elles définissent1.
2.1. Le dispositif en sémiotique
La sémiotique s’intéresse à la question des dispositifs lorsqu’elle se donne la tâche de décrire les principes signifiants qui organisent les effets de sens passionnels (Greimas et Fontanille, 1991). Ainsi l’articulation sémiotique d’une passion particulière s’organise toujours sous la forme d’une succession d’états préalables qui se présupposent les uns les autres. Par exemple, l’obstination est une figure passionnelle qui se réalise à l’intersection de trois états modaux : l’impossibilité d’une chose ; la conscience de l’impossibilité de cette chose ; le désir néanmoins que cette chose se réalise. Ces états ne constituent un dispositif que dans la mesure où leur organisation induit des relations de présupposition entre eux. C’est uniquement dans une configuration où le désir qu’une chose se réalise présuppose la conscience de l’impossibilité de cette chose, et cette conscience présupposant elle même l’impossibilité de cette chose, qu’on pourrait parler d’un dispositif de l’obstination.
Cette relation de présupposition dans cet ordre, c’est-à-dire dans cette articulation, est cruciale, faute de quoi on aurait affaire à bien des confusions. Par exemple, on pourrait s’apercevoir que ce sont des états identiques qui sont en jeu lorsqu’on effectue une analyse sémiotique du désespoir : l’impossibilité d’une chose, la conscience de l’impossibilité de cette chose et le désir que cette chose se réalise. Ce qui change précisément, c’est le rapport de présupposition entre ces trois états (leurs points d’articulation). Pour le désespoir, la chaîne des présuppositions va de la conscience de l’impossibilité de quelque chose au désir insistant que cette chose se réalise, malgré cette impossibilité.
On en vient à la dimension heuristique de l’idée de dispositif. Pour la sémiotique, aborder un phénomène par l’idée du dispositif, c’est prêter attention aux articulations qui l’organisent, mais c’est surtout identifier l’ordre des déterminations qui sous-tend ces articulations. Telle est notre hypothèse. Les formes d’articulation telle que manifestées en elles-mêmes relèvent de quelque chose qui serait de l’ordre d’un rituel, conformément à ce que l’expérience de la préparation à l’envol de l’oiseau nous a permis de voir. Quant aux déterminations, les contraintes de leur exécution, leur syntaxe en quelque sorte, est ce qui indique la praxis à l’intérieur de laquelle ce dispositif est opérant. Face à la structure récursive du dispositif, ces déterminations semblent opérer comme des surplus ou des suppléments de sens, autrement dit, ils ne sont en aucun cas prévisibles a priori, même s’ils y sont potentiellement imaginables.
Or, paradoxalement, ce sont elles qui servent de base à toute possibilité de signification, c’est-à-dire à la justification de toute interaction. Elles fonctionnent comme des déclencheurs de sens, ceux dont la fonction première est de traduire pour toute structure le sentiment personnel de l’énonciateur. Il peut s’agir des premiers mots d’un paragraphe, d’une attaque pour un article de presse, etc. Elles fonctionnent comme des déclencheurs de sens. Tel nous semble un des enjeux à venir si l’on souhaite que le robot manifeste la moindre relation sensible avec l’humain. Ce qui invitera à se concentrer non pas tant uniquement sur ses fonctions mécaniques, ni uniquement sur son comportement ou sur son aspect anthropomorphe mais à l’évidence davantage sur la syntaxe des points d’articulations qui sous-tendent ses mouvements.
2.2. Le dispositif en acte : le cas de l’interlocution
Un autre exemple démonstratif pour comprendre encore mieux cette question est donné par Kerbrat-Orecchioni (2001) dans son ouvrage Les actes de langage dans le discours. Il s’agit de celui de l’intervention réactive en situation de salutation. Selon l’auteur, « tous les traités de savoir-vivre nous rappellent qu’à la question « comment ça va ? » le questionné ne doit surtout pas infliger au questionneur un bulletin de santé en bonne et due forme ». En situation de salutation, la question « comment ça va ? » doit être perçue comme non orientée. Elle sollicite généralement une réponse de type positif : « oui, ça va » ou alors une formulation de type mitigée « ouais », « bof,… on fait aller ». Nous avons ici le dispositif propre à la situation de salutation. Autrement dit, pas d’investissement supplémentaire autre que cette situation de salutation.
Toutefois, par sa forme, en tant que question, cet énoncé peut aussi se prêter à une réponse négative : « comment ça va ? » ; « pas très fort », ça ne va pas bien », « ça va mal ». À l’inverse de la réponse positive, une telle réponse, on le sait, appelle plutôt systématiquement une expansion – « Ah bon qu’est-ce qui t’arrive ? ». Une nouvelle configuration se fait jour ainsi, alors que le questionneur était à solliciter une salutation, le questionné s’engage à répondre effectivement au « comment ça va ? » ou tout au moins à en faire l’objet de commentaire : « comment ça va ? » « pas fort », « qu’est-ce qui t’arrive ? » « ce n’est pas grave », « ça ne te regarde pas », « il m’arrive un gros malheur en ce moment », etc. Par la réponse négative, le questionné rompt ainsi l’ordonnance du rituel partagé des salutations. Il révèle et installe une lacune dans le dispositif propre à la situation de salutation, ce qui déclenche par la suite un récit, c’est-à-dire une interaction dont le sens est d’abord porté par une rupture introduite au sein d’un dispositif canonique.
Notre approche de la relation homme/robot humanoïde est du même ordre. Il faudrait alors repérer où se situe l’implicite qui aurait pour objet de « gouverner », « contrôler », « orienter », « déterminer », cette relation en tant que conduite et en tant que configuration particulières. En d’autres termes, ce n’est pas tant la relation elle-même telle qu’elle se déroule ou serait susceptible de se dérouler qui importe, mais notamment la/les situation(s) à travers laquelle/lesquelles se traduit cette relation, telle(s) que cette/ces situation(s) s’exercent et telle(s) qu’elle(s) est/sont ou peu(ven)t être portée(s).
Bien évidemment, l’arrière-plan reste toujours agonistique. Il s’agit de définir d’abord ce « qu’être en relation » veut dire et quel dispositif minimal cela suppose. Vaste question, tant les formes relationnelles sont innombrables. Or, s’en tenir à ces seules formes serait ne prendre en considération que les seuls enjeux agonistiques, ce qui n’est pas opérant.
Une autre approche, qui est la nôtre, est d’ajourner momentanément ces enjeux et de s’appesantir sur les points d’articulations qui en organisent l’exécution. En réalité parvenir à minimiser du mieux possible les incidences (la seule part agonistique justement), pour se focaliser sur les manifestantes, c’est-à-dire sur la part effective, organisatrice, phénoménologique, dirait-on ( ?), qui porte cette relation.
3. Formes de présence
Le terme-clé est ici celui de la « présence » : être en relation avec l’autre, c’est au moins prioritairement lui être présent d’une certaine manière, face à lui, avec lui, contre lui, derrière lui, en-dessous de lui, au-dessus de lui, etc. autrement dit, l’ensemble des biais topologiques que nous savons imaginer à ce jour. Quelles en sont les déterminations ? Partir des biais topologiques pour envisager la relation conduit à s’interroger au moins préalablement sur les modes d’existence de ces derniers ; adviennent-ils de manière active, passive, impliquée, mécanique, etc. ? La réponse à ces questions est cruciale pour souligner la particularité des situations ainsi envisageables lors de toute relation.
Sans devoir obligatoirement établir de typologie, et en suivant les réflexions théoriques menées sur la question, deux cas-typiques sont à identifier, l’un régulé par un principe de présence-absence, l’autre par un principe de coprésence.
Le principe de présence-absence est à l’œuvre quand quelque chose est à l’autre ou quand l’autre est à soi et inversement comme hors de lui, en périphérie, avec évidemment l’ensemble des degrés imaginables. C’est cela qu’exprime, par exemple, un phénomène comme la « distraction » dans une relation intersubjective, quand on est avec l’autre sans faire tout à fait attention à ce qu’il dit, et de manière plus radicale, le phénomène dit du « dialogue des sourds », quand dans une interlocution, l’un et l’autre sont absents l’un de l’autre, etc. On peut aussi être absent à des choses, ce que porte notamment tout phénomène de routine, dont on sait qu’une des manifestations est de réduire tout effort cognitif à son insignifiance.
Quant à la coprésence, elle opère de son côté comme un fait de continuité, au point que ne compte plus que la part commune des positions en interaction. Éric Landowski qui aborde en profondeur cette question, l’étaye à travers une série d’exemples anecdotiques dignes d’intérêt. Il parle par exemple de cette relation habituellement observée entre le violoniste virtuose et son violon qui, du fait d’une certaine forme d’usure, finissent par s’accomoder l’un à l’autre au point qu’on ne sait plus les imaginer séparément. Dans ce cas, dit Landowski, « l’usure pas plus que l’habitude, ne s’analyse plus comme perte : l’une et l’autre induisent plutôt un gain progressif de valeurs » (Landowski, 2004). Il en est de même dans cet autre exemple qu’il cite qui est une des conséquences habituelles des effets de la vie à deux : « À force de se fréquenter, lequel est-ce donc de cette dame ou de son petit chien, qui s’est mis à ressembler à l’autre au point qu’on finit par les confondre ? » (idem, 133) Tel nous paraît le point absolu si nous devions revenir aux modes d’existence des biais topologiques posés plus haut.
Au final, tout semble se résoudre du fait de la nécessité ou non d’imaginer un fait de médiation entre les positions ainsi envisagées. Pour le principe de présence-absence, l’être ensemble ne serait opérant ainsi que moyennant au moins un acte de sollicitation, que cet acte aboutisse ou non, telle n’est pas la question. Ainsi le distrait ne sait venir à l’autre que moyennant un réveil, en tout cas une incitation seconde. Dans leur articulation, les positions en présence le sont ainsi sous un régime discursif que Landowski qualifie de « régime de la jonction ». Un élément, un acte périphérique est absolument nécessaire pour justifier le mode d’existence des positions en question.’
À l’inverse, exit tout fait de médiation pour le principe de coprésence : le régime discursif serait alors celui de « l’union ». Nous retenons ici par exemple la définition formulée par l’ethnologue Albert Piette, un des théoriciens à avoir abordé aussi cette question : « l’idée de coprésence ne désigne pas d’abord une présence entre, mais une présence de X et de Y, par exemple de la salle toujours déjà là, avec ses tables, la lumière et de moi qui arrive… » (Piette, 2008). Et pour Landowski encore, ce qui est vraiment en question, c’est l’idée de l’un sans l’autre. Il retient ici la figure mythologique du Centaure : « Mythologiquement, la figure du Centaure offre […] tout en montrant que la plus belle conquête de l’homme n’est pas, finalement, le cheval, mais le couple (l’actant duel) qu’il forme avec le chevalier. L’un sans l’autre, (comme de nouveau le violoniste sans sons instrument, et réciproquement), n’est pas grand chose, et ce qui compte seul, c’est en l’occurrence l’œuvre commune que représente leur parfait ajustement esthétique » (idem, 135).
4. Vu du corpus
Il est donc temps d’en dire davantage sur la relation particulière de l’homme au robot humanoïde ; une relation particulière dans la mesure où elle induit toujours nécessairement deux arrière-plans contraints et qui courent le risque d’être lus aussi au premier abord comme contradictoires, quel qu’en soit le mode d’exécution : un arrière-plan contraint par sa part mécanique, programmable et programmé (tout robot humanoïde, n’est jamais qu’un gros ordinateur sophistiqué) ; et un arrière-plan lié à la part humanisée du robot humanoïde avec tout ce que cela suppose de ritualisé, de codifié ainsi que d’imprévisible (d’intuitif ?). Autrement dit, dans cette relation, il sera toujours nécessaire d’identifier, à la fois des caractéristiques qui d’un côté seraient propres au principe de présence-absence – l’exécution de toute programmation nécessite toujours un déclencheur d’action – et de l’autre côté, celles qui seraient propres au principe de coprésence – la part humanoïde du robot humanoïde ne pourra se justifier par sa capacité à s’ajuster à l’humain. On imagine ici entre les deux l’existence d’une communauté des manières d’être et de faire (dont la figure du Centaure est une des meilleures illustrations). Telle nous paraît l’astuce de l’humanoïde, que nous opposerons ainsi à l’automate. De quelle manière cette relation opère-t-elle dans les formes concrètes, en fonction des possibilités techniques disponibles à ce jour ?
Nous commençons en prenant appui sur deux chorégraphies schématiques de deux robots humanoïdes, les plus en vue en ce moment sur l’offre accessible : l’une de Nao, le robot humanoïde développé et commercialisé depuis 2007 par la société française Aldébaran Robotics, et l’autre d’Asimo, son alter ego, un des robots de référence de la société japonaise Honda.
4.1. Enjeux des chorégraphies
Chorégraphie n° 1
- Note de bas de page 2 :
-
Consulté le 28 janvier 2013.
http://www.youtube.com/watch?v=EUitCwDs3O0&feature=endscreen2
Cette chorégraphie met en scène le robot Nao en train de produire un écrit manuel avec un stylo feutre, sur un tableau à sa disposition. Si dès le début de la production de l’écrit, une fois qu’on a compris la tâche à laquelle il s’adonne, il est possible de se conditionner sur le fait qu’il y parviendra, reste le mode d’exécution. On observe ici un mode opératoire particulièrement hésitant, et qui n’est rassurant que de proche en proche. Nao est comme contraint à s’appliquer sur chaque geste, en sollicitant plusieurs efforts pour souligner chaque dessin de trait, et pour accompagner le déploiement horizontal de son écrit. On se demande à tout moment s’il y parviendra.
Il en résulte les caractéristiques propres aux principes de présence établis précédemment. Le principe de présence-absence opère dans la mesure où on imagine la scénographie élaborée expressément pour conduire Nao à sa performance. Il provient d’un angle de la pièce, suit une trajectoire et exécute son action. Par ce parcours, il s’agit en effet d’une série d’actes programmés, dont on voit qu’ils sont déclenchés nécessairement par un fait de sollicitation. Nao apparaît pour exécuter une performance et il l’exécute. Il suit pour cela une trajectoire, allant de son apparition jusqu’à la fin de sa performance. Tel est le dispositif propre à son acte. Toutefois, on voit bien que la seule description mécanique de ce parcours ne suffit pas à rendre compte de la situation en question et qui peut être décrite de manière plus large sous différents angles. La performance de Nao pourrait donner l’impression de quelque chose de surprenant si on n’a pas l’habitude d’un tel fonctionnement des robots, ou à l’inverse n’être qu’une action banale pour qui en a l’habitude. On pourrait aussi y voir une approximation dans la mesure où le rapprochement avec l’acte d’un humain n’est pas tout à fait probant, ou alors l’évaluer aussi comme une prouesse. En réalité, peu importe. Ainsi s’inscrit le principe de coprésence.
Diverses lectures très différentes, et même contradictoires, sont possibles. En revanche, tout comme l’incertitude définitive, aperçue plus haut, sur l’origine de la ressemblance entre la petite dame et son chien continue de demeurer sans autre incidence, on n’aurait pas absolument besoin d’en savoir davantage. Reste le principe de coprésence lui-même. Il se justifie en réalité du fait de ces hésitations possibles. Quel en est le centre organisateur ?
Il nous semble que tout en effet repose sur ce mode opératoire particulièrement hésitant de Nao. Ce n’est plus tant le parcours et l’effectuation proprement dite de la performance qui interpelle. La diversité des situations envisageables ici nous paraît le fait précis des caractéristiques plastiques qui accompagnent l’exécution de l’acte du robot. Ces caractéristiques plastiques, soit s’appuient sur des effets d’origine perceptive, liées par exemple à tels effets de rythme en particulier, soit peuvent aussi être d’origine cognitive, du fait par exemple d’une articulation processuelle particulière : on voit ainsi que Nao, pour tracer ses lignes est conduit à combiner telle distance, telle force sur le stylo avec telle vitesse et telle application en particulier. Pourrait-on parler d’effet de style, ce qui induit telle vue particulière (telle poiesis) de l’acte de Nao. Mais ces caractéristiques peuvent être aussi simplement d’origine esthétique, tel doigté, telle expressivité, telle gestuelle, par exemple, du robot. Il s’agit des fondements qui, de proche en proche, se constituent comme des répondants à l’ajustement de l’homme au robot humanoïde, indépendamment de la performance attendue de ce dernier. Ici se jouent les ritualités et la base des codifications prévisibles, c’est-à-dire à construire, qui confèrent sa part humanoïde, c’est-à-dire ajustable, au robot.
Chorégraphie n° 2
- Note de bas de page 3 :
-
Consulté le 28 janvier 2013.
La deuxième chorégraphie décrit une performance éclatante d’Asimo. Le geste est précis, proche de la signalétique. Le robot déploie une série d’actes déjà fortement ritualisés, opérés à la manière d’une hôtesse d’accueil, dans un jeu de démonstration, en recevant et en accompagnant une personne en visite dans un espace des commodités, peut-être un espace de réception dans un hôtel. La démarche est vive, le geste calculé, la voix claire. Le robot se distingue ensuite par sa capacité à traduire, avec une précision extrême, trois commandes de boisson formulées instantanément à son attention, il parvient à les détailler une par une, en attribuant sans aucune confusion sa demande précise à chaque ordonnateur. Les deux principes de présence sont encore effectifs, mais dans des termes totalement différents et même inverses.
À l’endroit où la performance de Nao était contrainte par les hésitations de son exécution, celle d’Asimo se distingue par une conformité, et même au-delà, de son acte in situ avec ce qu’on attendrait d’un être humain. De ce point de vue, c’est le principe de présence-absence qui semble prendre le pas sur le dispositif de son acte d’exécution. Ce principe est instrumentalisé au bénéfice d’une démonstration sur la capacité du robot à faire aussi précisément et même mieux, qu’une hôtesse humaine. Quant au principe de coprésence, bien que périphérique à la situation, il réside essentiellement dans les ritualités et les codifications déjà établies, ce qui fait qu’on finit aussi néanmoins par reconnaître sa part humanoïde à ce robot. Les caractéristiques plastiques afférentes à l’exécution de sa performance opèrent ainsi moins comme des répondants à l’ajustement. Seuls quelques éléments génériques y conduisent. Il donne l’impression de marcher à la manière d’un homme, d’articuler un langage proche du langage de l’humain, parvient à simuler une interaction avec un vis-à-vis.
4.2. Ritualités de la relation
Nous arrivons à un des enjeux principaux de la relation particulière au robot humanoïde. Cet enjeu est résiduel et procède de formes de ritualités induites lors de l’exécution de leur performance par les robots : ou bien la performance induit des « ritualités à construire », ou bien elle induit des « ritualités génériques », nous dirons « usées ».
Pour les ritualités à construire, la part belle est conférée aux caractéristiques plastiques propres à l’exécution de son acte par le robot. Dans leur manifestation, ces caractéristiques ne visent pas à inscrire un réseau de relation au bénéfice d’un système causal, de type narratif ou figuratif (référentiel) par exemple. Il n’est pas question de faire valoir un savoir commun, mais de témoignage, de « formes-témoins ». Ce sont elles qui figurent les points de connexion qui rendent possibles et prévisibles les actions communes entre l’homme et le robot humanoïde. Le résultat produit est un effet de figuralité, dans le sens que Louis Panier (2009, 4-15), accorde à cette notion, à savoir une situation où, tout en gardant sa spécificité, toute entité, en tant que grandeur, est susceptible de devenir autre chose que ce qu’elle est à l’origine.
C’est l’émergence de cette autre chose qui justifie le principe de coprésence. Il s’agit de l’espace précis d’ajustement dont nous avons vu qu’il pouvait opérer sous différentes origines, perceptives, cognitives et, notamment, esthétiques. Cet ajustement fonde la continuité entre l’homme et le robot humanoïde, construisant par là même la particularité de leur relation qui devient une relation sensible, une relation esthétique. En clair, le dispositif spécifique à cette relation n’est plus simplement envisageable sur le seul fond d’une performance, il engage des êtres tels qu’ils sont, l’un, l’humain, dans son humanité, l’autre, le robot, dans son désir d’humanité : une des raisons pour parler aussi de la relation au robot humanoïde comme d’une relation à un compagnon.
Le cas absolu d’un tel ajustement, dans l’univers de la robotique, est l’androïde, forme de robot où l’ajustement à l’homme va jusqu’au mimétisme quasi parfait (voir Maria Fernanda Niño, p. 35). Ses caractéristiques plastiques, avant même toute performance, valent déjà en soi, devenant par ce seul fait, l’unique support des ritualités à construire, ce qui peut être dérangeant. L’apparence tout entière du robot devient la forme-témoin, il a un aspect humain mais réfère à autre chose, alors commence l’impression d’étrangeté décrite par Masahiro Mori en 1970 sous son concept de Uncanny Valley (vallée dérangeante ou vallée de l’étrange).
Pour les ritualités usées, la part belle est accordée aux effets de performance. Les caractéristiques plastiques induisent non plus des effets de figuralité, mais des effets de référence. Nous l’indiquions, il s’agit de conférer au robot et à ses actes l’aspect le plus reconnaissable. On multiplie et on insiste sur les procédures d’intégration des figures entre elles. Par exemple, dans le cas emprunté, tout l’enjeu discursif est de faire-paraître Asimo à l’image d’une hôtesse d’accueil avérée et même au-delà ; sa démarche, ses gestes, sa voix y contribuent. Toutefois, il demeure de toute évidence un robot. Son design témoigne toujours du fait qu’il est robot, voire ses attributs physiques (afin de correspondre à une interaction fixe voulue de lui par son interlocuteur). Sa forme désigne, en sorte, son fond : reconnaissable d’emblée par celui ou celle qui se fait accueillir. La relation et l’échange ne pourrait fonctionner si le contrat ne supposait pas a priori qu’Asimo soit un robot et ce de façon perceptible. Le résultat est celui d’un effet de figurativité, fondée sur une visée de vérité (Rastier, 1986) et/ou d’authenticité (Fontanille, 2004). Peu importe telle spécificité particulière de telle caractéristique plastique prise isolément, du moment que, s’inscrivant en réseau avec d’autres caractéristiques, elle contribue à construire une référence reconnaissable. Il s’agit donc d’une relation particulière homme-robot humanoïde qui est ici une relation plutôt programmée, prévisible, construite essentiellement sur le modèle de la reconnaissance ou de la conformité.
On retrouve ici un cas absolu, l’automate proprement dit, capable d’élaborer tel acte particulier conforme à une pratique particulière. C’est par exemple le cas des automates qui remplissent des fonctions spécifiques propres à l’homme. On s’y retrouve parce que la tâche accomplie réfère à ce dont nous avons l’habitude, délivrer un ticket de train, un timbre par exemple.
5. Conclusion
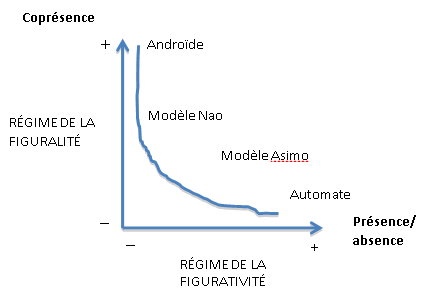
Au final, partant de nos deux cas absolus, on voit bien l’importance à accorder aux formes plastiques qui organisent la structure des robots humanoïdes, ainsi qu’à leurs enchaînements. Contribuent-elles, ainsi que leur enchaînement, à porter quelque chose de reconnaissable d’emblée (régime de la figurativité ou des ritualités usées) ou contribuent-elles à témoigner d’autre chose en dehors de leurs spécificités propres ? La réponse à ces questions augurent des formes de présence possible avec les robots humanoïdes et sûrement de leur mode identitaire particulier : selon le principe de coprésence ou selon le principe de présence-absence. On ira ainsi des formes extrêmes aux formes plus pondérées.
Le schéma ci-dessous nous permet de formaliser une grille imaginable de ces possibilités ; des possibilités variables en fonction de l’expression lors des chorégraphies, soit du gradient de la coprésence, soit de celui de la présence-absence.