Le Soi dans un autre corps
Potentialités identitaires reproduites à travers le Geminoid The Self in another body: potential identities reproduced through a Geminoid
À partir des expériences que des chercheurs japonais et français ont menées dans la science des androïdes, cet article entend explorer, dans une perspective sémiotique, les enjeux identitaires du Geminoid et les modalités de décryptage des modes d’existence que ce robot-androïde opère chez les humains. Prenant comme point de départ la fonctionnalité des Geminoids : reproduire l’expression humaine et être ainsi capables de la remplacer dans des situations d’interaction sociale, cet article met en évidence les pratiques identitaires des Geminoids en relation avec les nouvelles possibilités d’existence et de présence humaine (le « Je » dans un « ici » mais aussi dans un « ailleurs ») et la complexité des fonctions référentielles (le Moi, le Soi vs. l’autre-Moi, l’autre-Soi) que ces robots-androïdes occasionnent par leur introduction dans le paysage. Les résultats de l’analyse sont projetés sur l’articulation d’un carré sémiotique qui définit les modes et les stratégies d’existence des Geminoids à partir de quatre positions : l’affirmation, la négation, l’incarnation, la dissimulation. Ce qui permet en conséquence d’approcher les rapports homme-Geminoid.
L’article se conclut avec quelques considérations sur les potentialités identitaires du « Soi » dans les pratiques du web social et les extensions du « Soi » par l’utilisation des PDA.
Based on the experiences that Japanese and French researchers have carried out into the android science, this article is a semiotics analysis of the Geminoid identity issues and the decoding modalities of the ways of existence that this android robot produces in humans. Taking as starting point the Geminoid’s function : to reproduce the human expression in order to substitute it in a social interaction environment, this article highlights the Geminoids’ identity practices regarding to the new human presence and existence possibilities (the “I, the “self” being present “here” but also “anywhere”), and the complexity of the referential functions (the “I”, “the Self” vs. the “other-I” and the “other-Self”) that these androids-robots produce by entering into the everyday life. The analysis results are projected on a semiotics square that defines the ways and the strategies of the Geminoid existence by setting four positions : affirmation, negation, incarnation, concealment. These four positions allow approaching the relationship between humans and the Geminoid.
The article concludes with some reflections about the potential identities of the “self” throughout the social web practices, and the extensions of the “self” throughout the use of PDA.
1. Introduction
- Note de bas de page 1 :
-
Voir site internet des laboratoires ATR. Rubrique « Mission ». http://www.geminoid.jp/en/mission.html
La fin de l’ère de l’informatique coïncidera avec le début de l’ère des robots. Toutefois, nous ne sommes pas loin de voir un monde dans lequel les humains et les androïdes marcheront ensemble comme dans les films et les bandes dessinées1.
Cette affirmation du professeur Hiroshi Ishiguro du laboratoire japonais ATR (Advanced Telecommunications Research Institute), n’est pas très éloignée de la réalité. Avec son équipe de recherche interdisciplinaire, il travaille sur la création d’un robot-androïde capable de représenter un être humain à son image. La raison de s’intéresser à ce projet réside dans le fait que « nous, [les humains], nous avons tendance à anthropomorphiser les choses qui ne sont pas humaines […], nous anthropomorphisons toujours des objets de communication et d’interaction » (Ishiguro, 2006). Toutefois, les rapports d’interaction et de communication dans la relation humain-robot, comme l’affirme le professeur Ishiguro dans son rapport, ont été négligés. Surtout ce qui concerne « l’apparence vs les problèmes de comportement. »
- Note de bas de page 2 :
-
Le corpus qui sera ici l’objet de cette analyse porte sur des images et des expériences avec les Geminoids, disponibles sur les sites officiels des laboratoires de recherche concernés, en plus des documents en ligne publiés par les chercheurs qui travaillent avec les Geminoids.
La création d’une série de trois robots androïdes, connus sous le nom de Geminoids2, vise à pallier les limitations ci-dessus mentionnées. En effet, comme le nom le suggère, « Geminoid » du latin « geminus » (jumeau ou double) et « oid » suffixe indiquant « similarité », ce robot a pour fonction d’être le double d’une personne existante. Ce qui permet à la science des androïdes (the android science), d’étudier les dimensions cognitives, anthropologiques et sociales de l’être humain ; en particulier, les effets de la communication non verbale et les effets de présence et d’existence propres à celui-ci. Parmi leurs principaux objectifs, les chercheurs tentent de répondre à ces questions scientifiques : Comment les êtres humains reconnaissent-ils la présence humaine ? La présence humaine peut-elle se projeter à distance ?
2. Les effets du Sonzai-kan et du Shinwakan
À Osaka, les Geminoids et les humains se côtoient. Au-delà des salons d’exposition et des grands évènements organisés par la communauté scientifique, les Geminoids partagent le même espace social que les humains et participent ponctuellement à la vie quotidienne. Ils se montrent dans les cafés, les bars, voire sur la scène d’un théâtre où ils jouent un rôle. Cela fait partie des expériences du laboratoire ATR pour étudier l’interaction entre les humains et les robots.
- Note de bas de page 3 :
-
Propos recueillis par la BBC News, le mercredi 27 juillet 2007. http://news.bbc.co.uk/2/hi/science/nature/4714135.stm
- Note de bas de page 4 :
-
IRC. Intelligent Robotics and Communication Laboratories. www.irc.atr.jp/en/research-projects/geminoid/
- Note de bas de page 5 :
-
ATR Intelligent Robotics and Communication Laboratories (2006). Understanding the Mechanism of Sonzai-Kan. Version pdf. http://www.geminoid.jp/projects/kibans/Data/panel-20060719-mod2-eOnly.pdf
Au-delà du fait d’intégrer les Geminoids dans un espace social qu’ils partagent avec les humains, il est aussi question d’étudier les effets que les robots-humanoïdes suscitent chez ces derniers. Le professeur Ishiguro affirme3 qu’après la création de son premier androïde nommé Repliee Q1Expo, il s’est rendu compte de l’importance de l’apparence humaine chez le robot androïde (the humain-like robot) par opposition au robot traditionnel (the robot-like robot)4, mais surtout, il a remarqué le fort sentiment de présence que ce type de robot peut dégager face à son interlocuteur. Ce sentiment de présence, traduit en japonais par sonzai-kan5, a donc été la piste pour créer le Geminoid, un robot androïde qui peut passer pour un humain pendant une courte durée.
- Note de bas de page 6 :
-
Revue en ligne : Live science : http://www.livescience.com/20909-robotics-uncanny-valley-translation.html
Parmi les diverses expériences qui mettent en évidence cette « fausse présence humaine », celle menée par Grimaud et Paré (2011) met en scène un chercheur assis avec un robot Geminoid, alors que son opérateur se trouve dans une pièce voisine. Les chercheurs ont d’abord constaté un certain nombre de dysfonctionnements entre les mouvements de l’opérateur et leur reproduction par le robot. Aucun technicien ne maîtrisait à lui seul les nombreux circuits et programmes régissant les mouvements du robot, ce dernier se retrouvait donc constamment en panne. Ensuite, ils ont constaté que le contact avec ce pseudo-humain questionnait surtout le simple fait d’être humain. À différents moments, l’expérimentateur coupait court au jeu, faisant part à l’opératrice de sa crainte de perdre ses points de repère familiers dans le réel. Autrement dit, une « confusion ontologique » qui découlait de l’absence d’un sentiment de présence (d’un signe de « vie ») dans l’interaction avec le Geminoid. Les résultats montraient que l’expérimentateur éprouvait en réalité un effet de dérangement, à l’opposé de ce que le professeur MacDorman6 décrit comme l’impression d’être en présence d’un humain (shinwakan en japonais) – le moment où une personne est en synchronie avec une autre personne et face à celle-ci éprouve de la « familiarité », du « confort » et de l’« affinité ». Pour l’expérimentateur, découvrir qu’il s’agissait d’une interaction entre une machine et un humain, où le critère de présence humaine n’était valable que pour une des deux parties, a provoqué chez lui un sentiment d’« étrangeté » ; une absence de synchronisation.
Des expériences comme celle-ci ont conduit l’équipe du laboratoire ATR à travailler sur les effets du sonzai-kan avec pour principal objectif de répondre aux questions : Qu’est-ce qu’un être humain ? Quelle est l’essence des êtres humains ? Qu’est-ce que la présence ? Qu’est-ce qu’une relation ? Qu’est-ce que l’identité ? Des questionnements philosophiques qui sous-tendent la diversité des modes de traitement de la personne à l’intérieur d’un espace social donné où les formes de vie ne sont pas seulement celles du « Moi » et du « Lui » ou d’« Elle », mais également celles du « Je », du « Soi » et de l’« autre-Moi ». L’hypothèse serait que les traits anthropomorphiques, les expressions gestuelles et comportementales, ainsi que les formes vestimentaires qui sont attribués aux Geminoids sont un ensemble d’éléments qui concourent à faire de ces robots androïdes un « autre-Moi ».
3. Des modèles aux répliques
- Note de bas de page 7 :
-
Ibid. Rubrique « overview » : www.geminoid.jp/projects/kibans/overview.html
À la différence des robots qui ont été créés pour effectuer des tâches ménagères ou pour travailler dans des usines, ou encore à la différence des robots expérimentaux œuvrant là où l’humain pourrait courir un danger, les Geminoids sont une « nouvelle catégorie de robots » (Ishiguro, 2006). Il s’agit de robots androïdes. Dotés de capteurs mutisensoriels, ils sont conçus pour être capables de se comporter comme des êtres humains et d’interagir avec eux dans des contextes réels. Leur parole et leurs gestes sont téléguidés à distance via internet, mais ils peuvent aussi reproduire leurs propres mouvements de manière partiellement autonome. Ils savent bouger tête, torse et bras ; ils peuvent simuler la respiration et mimer un large répertoire d’expressions gestuelles qui se concentrent principalement sur le visage. On les définit ainsi comme de nouvelles personnes réelles (new real-persons)7, car ils ressemblent et sont à même de se comporter comme leur modèle dont ils sont issus, définis comme des « personnes-sources ». Toutefois, ne pouvant pas encore mouvoir les jambes, les Geminoids n’apparaissent qu’en position assise.
- Note de bas de page 8 :
- Note de bas de page 9 :
-
Voir : http://www.gcoe-cnr.osaka-u.ac.jp/Geminoid/GeminoidF/f_resources.html
- Note de bas de page 10 :
-
Voir : http://geminoid.dk/
Trois modèles de Geminoids peuvent être recensés à ce jour : le Geminoid HI-18, le Geminoid-F9 et le Geminoid|DK10.
Créé en 2005 par le professeur Hiroshi Ishiguro de l’université d’Osaka, le Geminoid HI-1 ressemble physiquement à son créateur et reproduit ses gestes et les intonations de sa voix à travers des capteurs. Il est installé et visible uniquement dans le laboratoire de recherche où il a été créé (l’ATR), où il sert de support au développement de notions de « télé-présence » et de « présence humaine », ainsi qu’à la redéfinition de la notion de « présence humaine à distance ».
Le Geminoid-F est la version féminine du Geminoid HI-1. Créé en 2010, il a l’aspect d’une femme japonaise (dont l’identité-source n’a toujours pas été dévoilée). Le choix esthétique et technique du Geminoid-F porte sur le fait qu’il est moins mécanique dans ses gestes et qu’il se rapproche au maximum de la physionomie et du comportement naturel d’un être humain. Doté de moins de capteurs et de senseurs que son prédécesseur, le plus remarquable dans sa performance est sa capacité à chanter, à saluer et à sourire. Ceci lui a permis notamment de devenir la première actrice-robot du monde. Aujourd’hui, le Geminoid-F est essentiellement utilisé pour mener des études approfondies sur le comportement humain incorporé dans un robot.
Le Geminoid|DK, troisième robot androïde de la série, est le double du professeur Henrik Scharfe de l’Université d’Aalborg au Danemark et le premier Geminoid à avoir des traits non japonais. Créé par la firme Kokoro à Tokyo, sous la direction d’Ishiguro, et actuellement logé dans le Geminoid Lab au Danemark, le Geminoid|DK est la copie la plus fidèle du modèle de base. Cette fidélité est apparue aux chercheurs comme l’un des paramètres essentiels pour étudier d’une part, l’acceptation culturelle et le comportement des êtres humains face à un androïde aux traits caucasiens et d’autre part, pour apporter des réponses vis-à-vis du sonzai-kan : le sentiment de présence que le Geminoid peut susciter chez son interlocuteur tout en étant télé-opéré à distance.
3.1. L’anthropomorphisation des robots
Le Geminoid n’est plus seulement le calque d’une image, d’une personne-source, c’est une figure destinée à être vue et traitée à la manière d’un être humain ; un principe d’apparition dont la stratégie est celle du « faux semblant ». Plus précisément, il s’agit de tromper son interlocuteur par défaut, de perturber ses repères ontologiques, en remettant en question le processus de reconnaissance et d’identification, ce qui lui permettra d’accepter le Geminoid comme son homologue. L’anthropomorphisme du Geminoid porte sur un effet miroir (Phaneau, 2005) : une projection de soi sur un dispositif qui comporte l’ensemble de traits physiques, émotionnels, comportementaux et de personnalité qui permettent de mieux saisir la présence de soi.
Un exemple de cette construction provient de la première expérience (Nishio et al., 2007) opérée avec le Geminoid HI-1 lorsqu’il fut finalisé et prêt pour être montré au grand public. Le professeur Ishiguro raconte sa sensation d’être face à un miroir – bien qu’il admette ne pas s’être reconnu lorsque le Geminoid HI-1 a commencé à bouger. Le public qui assistait à l’expérience et connaissait bien Ishiguro affirmait avoir identifié ses caractéristiques propres dans les mouvements du robot.
3.2. État des lieux
- Note de bas de page 11 :
-
“In certain ways we can almost say that the design of the head paves the road for a display of personality. In the same sense as a really successful photo may capture the personality of a person, this model can also capture aspects of personality traits.”
Avec les attributs et les propriétés d’un être humain – physionomie, parole, mouvement –, le Geminoid est l’opposé des robots traditionnels issus de l’imagination mécanique des concepteurs. Il est envisagé comme le double d’une personne-source, capable de mimer la tonalité de sa voix et ses expressions faciales ; de plus, la tête et le visage du Geminoid sont souvent reproduits en conformité avec les tonalités et les formes du modèle, notamment via un travail sur les teints de la peau et des cheveux, la couleur des yeux et des dents, l’épaisseur des poils, etc. Les parties comme le front, les yeux, le nez, la bouche, les joues, les oreilles, le menton et le cou, sont reproduites conformément aux tailles réelles ainsi que les marques personnelles comme les grains de beauté ou les tâches sur la peau. Reproduction fidèle de la personne-source, le visage du Geminoid reflète également des traits de la personnalité du modèle, au moins pour ce qui est du Geminoid|DK : « De la même façon qu’une photo vraiment réussie peut capter la personnalité d’un individu, ce modèle peut également calquer des traits de personnalité. »11
Les autres parties visibles du corps du Geminoid comme les mains, les bras et les jambes s’affichent aussi esthétiquement très proches de celles de la personne-source malgré la limitation de leurs mouvements. Enfin, une attention particulière est accordée aux accessoires et à la parure du Geminoid ; les concepteurs ne lésinent pas sur les moyens. Par exemple, le Geminoid|DK porte une bague de fiançailles sur sa main gauche à l’image de son modèle et le Geminoid-F, une chaîne autour du cou. La parure des Geminoids reproduit ainsi le style vestimentaire propre à la personne source, à la manière des pratiques de gémellité.
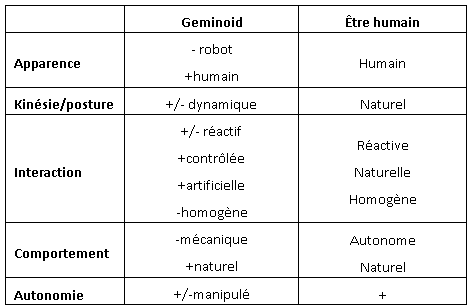
Pour résumer, la figure du Geminoid est soumise à des conditions modales de la vraisemblance (l’être et le paraître) selon qu’il imite ou pas l’humain dont il est le double, qu’il se comporte ou pas comme celui-ci. Son existence tourne ainsi entre le /réel/, le /naturel/ vs. l’/artificiel/, le /fictif/. Par sa nature, ce sont les traits /robot/ et /machine/ qui prédominent, avec notamment, des enjeux de /manipulation/ et de /contrôle/ dont l’impact est évident dans son activité et dans l’expression de son autonomie. Le tableau 1 reprend à grands traits ce qui distingue le Geminoid de l’humain.
Tableau 1. Distinctions Geminoid/être humain
3.3. L’image de soi
Dédoublement ou clone, réplique ou jumeau, le Geminoid revêt une identité concomitante avec une identité déjà existante. Téléguidé, mais aussi agissant automatiquement en raison d’une certaine autonomie, le Geminoid est capable de construire une image de lui-même dans son cadre d’interaction. Cette image pouvant être ou non en conformité totale avec l’identité de la personne-source. Autrement dit, les actes de présence et les interventions du Geminoid engagent toujours nécessairement une action en amont et pendant sa performance, un peu à la manière de Ruth Amossy pour qui « toute prise de parole implique la construction d’une image de soi. » (Amossy, 1999, 9).
- Note de bas de page 12 :
-
Darrault Ivan. Ethosémiotique : http://www.fflch.usp.br/dl/semiotica/cursos/darrault/darrault_ethosemiotique.pdf
Revenons à la première expérience avec le Geminoid HI-1 que nous avons cité plus haut, à propos de son délai de reconnaissance. Dans un premier temps, les spectateurs avaient identifié la silhouette d’une personne assise, et, ce n’est qu’en se rapprochant un peu plus de la cible qu’ils avaient réalisé qu’il s’agissait d’un robot. Il s’en était suivi un sentiment d’étrangeté et de nervosité qui bien évidemment était parvenu à disparaître une fois qu’ils avaient commencé à interagir avec le prototype. Cette expérience met en évidence d’une part, la construction de l’image de soi à partir des signifiants comportementaux que le Geminoid investit pour représenter la personne-source et d’autre part, le cadre de la construction identitaire dans lequel le Geminoid s’inscrit ; en effet, la figure de ce robot-androïde et son rôle dans l’environnement social ne sont pas reconnus que dans une situation d’interaction, à partir d’un acte de présence et d’échange où convergent langage, gestualité et proxémique (la nature syncrétique du comportement humain à laquelle l’éthosémiotique et l’éthologie12 s’intéressent) et où les signifiants comportementaux qu’ils investissent – automatiquement – jouent en sa faveur ou son discrédit.
3.4. Le Moi et l’autre-Moi
Le parcours interprétatif ira de la définition de la personne-source à sa redéfinition dans un autre corps qui ne lui appartient pas. En somme, il s’agit de réinventer une subjectivité. Dans ce sens, le Geminoid sera à considérer comme une forme identitaire prospective du « Je » et du « Moi » ; un « Je » et un « Moi » qui virtuellement pourraient devenir un « autre Je » ou un « autre-Moi » : une opération qui implique « la séparation du corps et de l’esprit », quelque chose d’impossible jusqu’à aujourd’hui, selon Ishiguro. En effet, et nous parlons ici du point de vue des concepteurs, il s’agit d’avoir conscience de l’existence humaine et de la perception du soi envers le soi-même et envers les autres pour que le Geminoid reflète de la manière la plus fidèle, ce que le « Je », le « Moi » et le « Soi » du modèle sont. Car il ne s’agit plus seulement d’une représentation tangible (le visible) de la personne-source, mais aussi, d’une tentative de reproduire l’essence (l’invisible), comme la personnalité, par exemple.
À ce jour, quatre pratiques identitaires semblent engagées pour ce type d’opération : les pratiques vestimentaires, qui affichent l’adhésion à un style ; les pratiques de lecture anthropomorphiques, comme la plasticité et l’esthétique du corps ; les pratiques comportementales ; et les pratiques de mise en présence (Landowski, 1997), dans lesquelles les dimensions thymiques et kinesthésiques participent.
Un autre aspect à prendre en compte dans ces jeux et opérations des potentialités identitaires et de réinvention d’identités est la façon dont le « Je » et le « Moi » s’expriment sur un corps qui est télé-opéré. Il est ici question de ce que Finley Klintron appelle l’« hypersigil » (Klintron, 2011), à savoir, la manipulation en temps réel d’une création et surtout, la manière dont celle-ci fonctionne. À partir d’une figure miniature, semblable à un objet issu de l’univers de la magie, ou alors à partir d’un hologramme ou d’une pratique telle que le vaudou, un corps à distance est manipulé dans le but de produire des changements dans la vie « réelle » de celui-ci. Dans le contexte de la robotique, Grimaud fait référence à la notion de manipulation en parlant du Geminoid comme d’une « marionnette électronique sophistiquée » (Grimaud, 2012). Il en découle des propositions de mise en scène que les chercheurs mettent à contribution pour tester le robot-androïde et qui préfigurent une forme de présence du « Moi » ; Un « Moi » manipulable par un autre « Moi » mais où les frontières de ce « Moi » deviennent floues et rejoignent la notion du « Moi-abstrait » dont parle Hegel (1975).
Quant aux mises en scène des Géminoids, elles préfigurent des formes d’existence/présence du Moi, les différentes formes par lesquelles le « Moi » peut se manifester. Une illustration nous est donnée à travers l’image ci-dessous qui s’affiche sur les sites internet des laboratoires qui travaillent avec le Geminoid.
Figure 1. Trois modèles et leurs prototypes

Il s’agit d’une photo où trois modèles et leurs prototypes posent ensemble. Les modèles sont placés debout derrière leurs doubles et les doubles sont en position assise. L’arrière-plan méthodologique est d’installer le doute chez le spectateur : Qui est le robot ? Qui est l’humain ?
L’effet de ressemblance produit inévitablement un sentiment de doute chez le spectateur. Le dispositif établit une co-présence de l’être humain et de son double. Mais cette co-présence ne repose pas sur des régimes de présence du même niveau hiérarchique. Dans le duo : modèle-Geminoid, le modèle n’a pas le même statut que son double. Il bénéficie de certains attributs comme la mobilité des jambes par exemple, qui leur permettent se tenir debout. C’est donc en fonction de ces différences (physiques et comportementales, en particulier) que se détermine l’identité du Geminoid. Il s’agit d’une expression identitaire orientée inversement au schéma canonique : l’autre (en l’occurrence, il/elle veut devenir moi). Dans le cas qui nous occupe ici, c’est le « je » qui veut que l’« autre » devienne « moi ».
3.5. La stratégie
- Note de bas de page 13 :
-
Voir: www.shifteast.com/android-mannequin-brings-shop-display-to-life-video/
Les expériences montrent de manière générale, qu’une disjonction finit toujours par se manifester entre l’/être/ et le /paraître/. Les dispositifs scéniques où les Geminoids apparaissent ne visent que le « faire paraître vrai » et à installer ainsi une « confusion ontologique » chez l’interlocuteur ; une illusion référentielle qui pour le professeur Ishiguro ne dure à ce jour que deux minutes et qu’il envisage d’augmenter. Cette illusion référentielle est exploitée aujourd’hui désormais pour d’autres types d’expériences, par exemple dans le domaine marchand. C’est le cas de l’expérience13 opérée avec le Geminoid-F dans une vitrine de Tokyo pour une animation commerciale lors de la Saint Valentin. En tant que mannequin androïde, le Geminoid-F devait soutenir diverses interactions avec les passants : leur sourire quand ils la regardaient ou bailler lorsqu’elle les attendait. Pour Ishiguro et le centre commercial Takashimaya à Tokyo, l’objectif était de conduire les clients à des réponses émotionnelles ; et pour la marque en particulier, il s’agissait de valoriser l’expression humaine et le service personnalisé de leurs magasins, par opposition à leurs concurrents qui continuent d’utiliser des mannequins traditionnels, froids et détachés. Au final, la disposition du mannequin, sa ressemblance avec l’être humain et ses gestes ont conduit les acheteurs à se montrer et à s’engager de manière très différente envers la marque, à l’inverse de ce qu’ils auraient fait s’ils avaient eu affaire à un mannequin inerte : une réussite donc au regard des règles anthropomorphiques et comportementales du Geminoid.
3.6. L’échec de la stratégie
- Note de bas de page 14 :
-
Propos recueillis par Temman Michel. Reportage. Au Japon, des chercheurs développent des robots à l’apparence humaine. Objectif : créer des machines capables de s’adapter à l’homme pour mieux le seconder. 22 septembre, 2007 : http://www.liberation.fr/week-end/0101111427-l-archipel-des-androides
Il n’en demeure pas moins que pour le Geminoid–F ainsi que pour les autres deux Geminoids en contexte d’interaction, certains défauts peuvent être plus apparents et étranges que pour les robots moins ressemblants aux humains (Macdorman et Ishiguroi, 2006). C’est ce que montre, par exemple, le roboticien japonais Masahiro Mori qui, en 1970, affirmait déjà que lorsque les robots rassembleront de plus en plus aux humains, ils pourront en effet nous sembler plus familiers et aimables (à la différence des robots industriels et des poupées). En revanche, à un certain moment, on observera qu’une ressemblance très forte – comme celle des cadavres, zombies ou prothèses – produira des sensations troublantes, notamment une des sensations d’étrangeté. Plusieurs études traitent ce phénomène (Jentsch, 1906 ; Freud, 1919 ; Lacan, 1962 ; Kristeva, 1982) et coïncident dans la description d’une courbe pour laquelle les valeurs de la ressemblance à l’humain augmentent ou diminuent de manière continue en fonction de la familiarité à l’objet. Cette schématisation, connue sous le nom de vallée dérangeante (The Uncanny Valley), provoque un contraste saisissant entre ce que le Geminoid simule et vise à substituer14 et ce qu’il est réellement. Pour revenir à l’expérience ci-dessus exposée, l’humanisation du mannequin de vitrine a représenté pour certains passants une familiarité négative donc un rejet de cette manipulation qui se joue sur les robots-androïdes. Il s’agit ici d’un axe de recherche privilégié à ce jour, les défauts du Geminoid en contexte d’interaction (Macdorman et Ishiguro, 2006).
4. De la réplique aux pratiques identitaires
Selon Emmanuel Grimaud, « Dans un avenir proche, nous pourrions tous avoir notre Geminoid pour nous remplacer dans une conférence lorsque nous serons absents » (Grimaud, 2012). Pour les industriels, l’idée de financer des projets pour la conception des Geminoids est de parvenir à « la matérialisation la plus aboutie d’un fantasme de dédoublement, et à la concrétisation physique la plus proche, dans la robotique actuelle, de l’idée de clone » (Grimaud, 2012). Un même objet, deux approches différentes. En effet, pour le chercheur, le Geminoid trouve sa place dans un environnement de surcharge de travail, où l’instance énonciative (le modèle) se fait seconder. Le principe à l’œuvre est de l’ordre de la substitution, il s’agit de suppléer à une absence. Pour les industriels, il s’agit de dédoublement : le Geminoid joue ici deux rôles : d’un côté, il est le double de la personne-source en raison de ses attributs physiques et comportementaux, ce qui lui permet d’assurer sa substitution physique, « acte de présence » ; de l’autre côté, le Geminoid est un robot aux attributs humains qui agit en tant qu’intermédiaire de la personne-source et qui se définit par rapport à l’autre (personne-source et êtres humains) mais aussi, par rapport à lui-même.
Nous supposons à partir de ces deux approches, que la frontière entre les deux instances (l’humain et la machine) se construit sur les bases de l’efficacité anthropomorphique et de l’interaction ; soit trois pratiques identitaires (Landowski, 1997) en fonction de l’une ou de l’autre de ces configurations : l’identification, la présentification et la représentation. Nous proposons d’y prendre appui pour fonder notre hypothèse, une typologie de pratiques identitaires du Soi et de l’Autre.
L’identification
Depuis Saussure, l’identification d’unités se fait par le repérage des différences qui les interdéfinissent. Bien que le robot-humanoïde relève d’un autre ordre, c’est principalement la reconnaissance d’une différence d’ordre anthropomorphique et comportemental qui constitue l’identité du Geminoid et le différencie de l’être humain. Du point de vue des concepteurs, la construction de cette identité se fait par différenciation, ce qui suppose l’association de certaines valeurs d’ordre esthétique, thymique et existentiel qui assignent au Geminoid un contenu spécifique et qui le séparent toutefois de son modèle. Il y a donc ici, une émergence d’« identité ».
Dans une situation d’interaction ordinaire entre un Geminoid et son interlocuteur, la plasticité du visage, la façon de se comporter et de parler, l’intonation de la voix ou la parure, éveillent implicitement ou explicitement, chez le spectateur, une conscience d’identification, donc la reconnaissance de l’« identité » de l’autre. Rentrent ici en jeu, des critères comme les effets du sonzai-kan et du shinwakan.
La présentification
« Ici comme partout ailleurs, c’est effectivement le point de vue qui crée l’objet, ou du moins qui lui donne sa signification. » (Landowsky, 1997, 119) Un moyen pour tenir compte de cette perspective consiste à envisager les virements thématiques de l’identité du robot androïde type Geminoid, dont la construction assure une relative étanchéité entre des identités personnelles qui, sans se confondre ni se mélanger, se partagent l’étendue du champ social. Une des manifestations est la situation de la télé-opération, qui implique l’introduction des dispositifs de mise en scène avec une spatialisation et une temporalisation de deux identités, celle du modèle et celle du Geminoid. Le « Je » d’ici et de maintenant et le « Je » d’ailleurs, qui ne s’envisageaient pas avant avec des dispositifs comme les visioconférences portent aussi sur cette idée de déplacement virtuel. Ceci suscite chez le modèle la découverte et la reconnaissance de ce qu’il est à travers le double de soi (« je suis ce que je suis dans la mesure où je ne suis plus ») ; (« je suis ce que je suis dans la mesure où je diffère – en partie – de ce qui tu es ») (Landowski, 1997). Le discours (verbal bien sûr, mais aussi celui du regard, du geste, de la distance maintenue) ne remplit pas ici seulement une fonction de signe dans une perspective communicationnelle mais en même temps, il acquiert une valeur d’acte : acte de génération du sens, et par là-même, acte de présentification (ibidem).
La représentation
Les dispositifs de mise en scène que les chercheurs utilisent dans les expériences avec le Geminoid ont la forme d’espaces de réflexion (Macdorman et Ishiguro, 2006) pour configurer et définir les aspects les plus divers des rapports entre les robots et les humains. Or, la représentation remplit ici la fonction d’un lieu utopique ou d’un monde possible où l’émergence d’identités parallèles est désormais envisageable et légitime. Ce lieu utopique et possible prend forme dans le Geminoid, d’où l’importance cruciale des critères éthiques et esthétiques qui lui sont rattachés car il s’agit d’une figure qui a été créée pour se développer en société.
Pour les robots androïdes, les pratiques identitaires de représentation sont codifiées selon des schémas culturels ; il est ainsi possible de constater une différence fondamentale entre les Orientaux et les Occidentaux. Les roboticiens occidentaux ne donnent pas des visages humains à leurs créations à la différence de leurs collègues asiatiques qui tendent à construire des robots dont les caractéristiques ressemblent autant que possible à celles des humains. Le Geminoid|DK par exemple, dénote un début de ce changement de paradigme dans les pratiques identitaires de représentation.
Ici et ailleurs
Capable de remplacer physiquement l’être humain dont il est le double, le Geminoid acquiert un rôle humain et une « présence » qui, selon le professeur Ishiguro, manque dans certaines situations telles que la visioconférence.
Une des expériences pour combler ce manque a été menée avec le Geminoid HI-1, pendant un mois dans un café où les personnes n’avaient pas d’accès aux robots. Le Geminoid HI-1, assis à sa place habituelle, était télé-opéré chaque jour par le professeur Ishiguro depuis le laboratoire, en même temps que celui-ci s’occupait de ses autres activités et s’entretenait aussi avec ses collèges à distance. Les résultats ont montré qu’un grand nombre de visiteurs n’étaient pas parvenus à réaliser qu’il s’agissait d’un Geminoid ; à l’inverse, ceux qui s’en étaient rapprochés s’en étaient fait un ami. L’expérience suggère que les Geminoids peuvent être adoptés comme un medium de téléprésence efficace lors d’une réunion à distance et dans ce cas l’acceptation sociale du Geminoid est plus favorable et moins réticente.
L’utilisation du Geminoid dans des situations de visioconférence a comme conséquence une présence concomitante d’un seul et même être dans un maintenant et un ici, mais aussi, dans un ailleurs. Une variation, voire une déviation des schémas canoniques de la présence humaine dans la dimension spatio-temporelle : l’ici et le maintenant. « Ce qui est vrai du maintenant l’est aussi de l’ici. Bien sûr, « être », c’est être nécessairement « quelque part ». Je suis localisé, et on sait où me trouver » (Landowsky, 1997, 8) mais avec l’utilisation du Geminoid, le « Je », le « Moi » et le « Soi » se trouvent ici et l’« Autre Je » et l’« Autre Soi » se trouvent ailleurs.
- Note de bas de page 15 :
-
Question que l’équipe des laboratoires ATR se pose pour étudier la complexité de la question de la « présence », produite par l’introduction du Geminoid dans l’espace social.
Pourtant, l’attribut de l’ubiquité n’est pas propre à l’homme et l’idée d’une reproduction d’identité se heurte à des schémas perceptifs et comportementaux de l’environnement quotidien ; comme l’illustre la réplique de l’article Can an android persuade you ? (Ogawa et al., 2009) : « Les premières copies d’humains réels sont déjà disponibles, ce qui permet à ses usagers d’être physiquement présents dans plusieurs endroits à la fois. » Dans ce contexte de double présence ou de présence concomitante, se pose la question notamment de voir ce : « que pourrait représenter l’autorité d’une personne en comparaison avec l’androïde »15.
5. Des pratiques identitaires aux modes d’existence
Simulation du vivant, autrement dit création ambiguë qui peut être perçue autant comme machine que comme personne, voire comme les deux, le Geminoid pourrait être approché autant du point de vue du devenir de l’objet que du point de vue du devenir du sujet (Fontanille, 1998). En tant qu’objet, les expériences avec le Geminoid montrent que le robot a évolué du statut où il était considéré comme une machine traditionnelle vers un statut de machine révolutionnaire. Les attributs et fonctionnalités de base du robot traditionnel, du type NAO ou Repliee Q1Expo, par exemple, se sont complexifiés et diversifiés pour donner forme à une nouvelle « machine » qui concourt désormais avec l’être humain. Du point de vue du devenir du sujet, le Geminoid, en tant qu’intermédiaire de la personne-source transmet, mais semble aussi à même d’« éprouver », un nombre varié, bien que limité, de sentiments d’existence et de manifestations de présence, selon qu’il parvient ou échoue à simuler des signes de vie propres à l’être humain. En fonction de l’intensité du lien (empathique) qui le rapproche de son modèle et de la vie humaine en général ainsi que de la quantité d’occurrences ou de récurrences qui déterminent son rôle de double, clone ou jumeau, le Geminoid sera à même de se rapprocher de l’expression de diverses figures dont certaines ont déjà été stéréotypées ici comme les modes d’existence du Geminoid : l’humain, le mannequin ou la figure de cire, la figure déguisée et le robot androïde ou marionnette électronique (Grimaud, 2012).
Typologie de la modalisation de la ressemblance
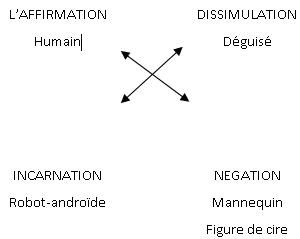
La création du Geminoid suppose un public, spectateur ou interlocuteur avec lequel il partage un espace social et instaure des échanges. En revenant aux expériences mentionnées ci-dessus, deux modalités s’imposent comme centrales pour comprendre les fondements de cette interaction, il s’agit des modalités actualisantes du /pouvoir faire/ et du /savoir faire/. Elles opèrent comme les deux régimes de base, porteurs des faits de ressemblance (identification et acceptation du Geminoid). L’interlocuteur, face à l’instance à laquelle il s’adresse « peut sentir ce que c’est » ou « savoir sentir ce que c’est », il se produit ici un effet d’identification d’une présence humaine (lexicalisée sur le carré sémiotique ci-dessous, par le terme « humain »). À l’inverse, lorsque, face à ladite instance, l’interlocuteur « ne peut pas sentir ce que c’est » ou « ne sait pas sentir ce que c’est », il aura tendance à se rapprocher de l’image d’un mannequin ou d’une figure de cire. C’est le fait d’acceptation qui est en question : il est face à une entité qui ne manifeste pas de signes de vie et qui paraît artificielle, immobile, inerte. Nous avons le premier pôle de la catégorie ici en question, l’affirmation d’une identité, ainsi que sa négation par la figure du mannequin.
En revanche, lorsque l’interlocuteur échange avec le Geminoid, malgré sa ressemblance humaine, un doute s’installe en raison d’un détail précis ou d’un attribut ; l’interlocuteur peut associer le Geminoid à ce qui, sur le carré est lexicalisé par le terme « déguisé ». L’interlocuteur « peut sentir ce qui n’est pas humain » et « sait sentir ce qui n’est pas humain ». Au contraire, en présence d’un être comme le Geminoid, l’interlocuteur « ne sait pas sentir ce qui n’est pas humain » et « ne peut pas sentir ce qui n’est pas humain » car il y a des signes de vie conjugués (comme les mouvements abdominaux de la respiration, le clignement des yeux, la réactivité dans la conversation), mais il y a aussi des signes artificiels, qui par une défaillance, peuvent révéler leur nature.
Le carré sémiotique de la figure 2 articule les modes d’existence du Geminoid que nous avons exposés auparavant et qui se conjuguent avec cette dimension émotionnelle qui opère chez l’interlocuteur.
Figure 2. Carré sémiotique des modes
et des stratégies d’existence du Geminoid
6. Ouverture : a « second self »
En projetant les caractéristiques des espaces matériels et concrets pour s’attarder sur les espaces virtuels qu’offre internet, nous pouvons dire que ces derniers opèrent sous le modèle de l’extension de soi (Goffman, 1973). Plusieurs cas de figure sont disponibles, nous n’en retiendrons que deux. Le premier cas d’extension de soi concerne la conception et construction d’une nouvelle identité, issue de l’imagination. De caractère virtuel car il s’agit d’un profil de blog, page personnelle ou de réseau social, l’extension de soi relève d’une manipulation de sa propre image, voire une négation de soi et de cet autre que l’on reconnaît en soi, pour en faire un tout nouveau sujet. Une construction nouvelle et différente qui porte ainsi sur la notion de dissemblance, de fausseté. Le deuxième cas est lié au rapport d’un sujet avec un appareil technologique qui l’assiste dans le quotidien comme le sont les PDA (Personal Digital Assistant) et que l’utilisateur envisage comme une partie de son corps. Dans l’introduction de son livre The Second Self, Sherry Turkle cite l’anecdote suivante d’un usager des PDA « Quand mon smartphone est tombé, c’était comme la mort. J’ai pensé que j’avais perdu ma mémoire ». Cette anecdote souligne de quelle manière la technologie est assimilée aujourd’hui, la manière dont on s’en sert et la relation psychologique qu’on y attache. Turkle utilise la notion de « second self » pour insister sur le fait que la technologie affecte la conscience que nous avons de nous-mêmes, des autres et de nos relations envers le monde.
- Note de bas de page 16 :
-
Beaudoux Clara. Reportage : « Facebook, le plus grand cimetière de la planète ? Le jeudi 1 novembre 2012. http://www.franceinfo.fr/high-tech/le-plus-france-info/statut-facebook-je-suis-mort-787117-2012-11-01
Les nouvelles potentialités identitaires qui émergent portent sur la manière d’intégrer les technologies à sa propre vie. Le rapport homme-machine ne paraît pas porter sur un rapport d’interaction mais sur une opération d’intégration pour devenir un seul sujet-objet comme le montre l’anecdote de Turkle. Les appareils technologiques sont considérés comme à la frontière de l’animé et de l’inanimé, de la même manière que le sont les Geminoids. Ceci présuppose la nécessité d’une approche différente de la pensée humaine, des émotions, de la mémoire et des processus de compréhension de l’existence humaine. Nous nous questionnions sur l’appropriation de ces objets ambigus et leur devenir, en réalité la question s’est déjà posée et une solution envisagée est celle du coffre-fort numérique16, une question qui conduit à aborder le Geminoid dans sa différence de nature avec son modèle. Alors que le coffre-fort numérique aura pour effet de garantir l’immortalité du Geminoid, il n’en est pas ainsi de son modèle qui lui reste « mortel », « singulier » et « temporel ». Dans quelle mesure le Geminoid devra-t-il poursuivre son existence, une fois son modèle disparu ? C’est la question essentielle de la non-obsolescence de la machine.