Commande manuelle assistée
Ce type de commande est couramment utilisée en hydraulique pour commander manuellement un déplacement d'organe mécanique eu profitant de l'énergie hydraulique pour actionner le mouvement. C'est le cas par exemple pour les systèmes de direction assistée de gouverne de bateau. Ce principe est également utilisé pour déplacer la tige d'un vérin de commande de cylindrée d'une pompe.
Cette énergie est maîtrisée grâce à un dispositif qui réalise un asservissement de position.
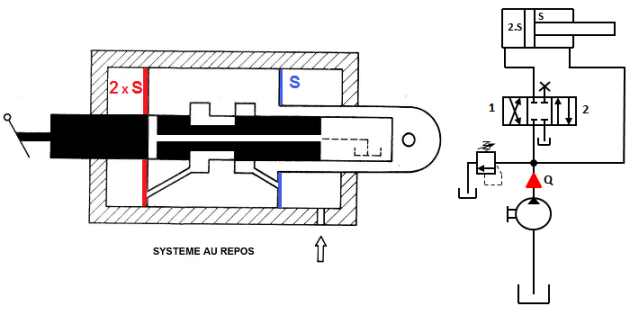
Dans la plupart des cas, la partie hydraulique de commande comprend un vérin particulier dont la section de la tige est la moitié de la section de l'alésage. Le rapport des sections sur lesquelles s'appliquent les pressions est donc de 2 : Scoté fond = 2 x Scoté tige = 2 x S.
Ici, le système est en équilibre. Aucun orifice n'est relié au réservoir et le vérin est donc au repos. Le système en coupe correspond à l'ensemble distributeur - vérin représenté sur le schéma.
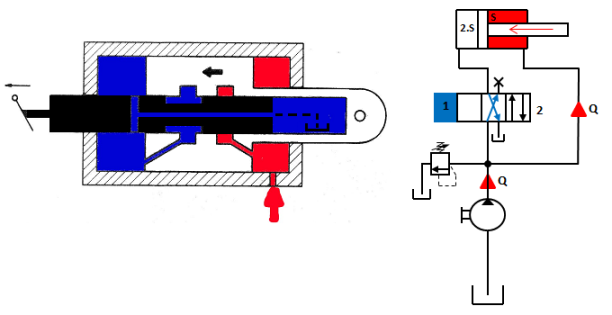
Pour commander la rentrée de la tige, on tire le levier de commande vers la gauche. Le fluide agit coté tige sur une section valant S. La vitesse de rentrée de la tige est V1 = Q/S.
On obtient ici une amplification de l'effort de commande ou une assistance. En effet, pour un effort de commande modéré, on mobilise une puissance hydraulique importante.
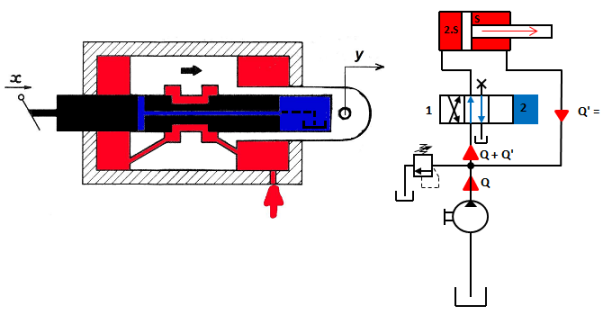
Pour commander la sortie de la tige, on pousse le levier de commande vers la droite. Le fluide agit coté tige sur une section valant S et coté fond sur une section valant 2.S. La pression étant identique des 2 cotés de la tige, celle-ci se déplace vers la droite à une vitesse V2. Cela induit un débit sortant coté tige Q' =V2.S. Du coté fond du vérin, le fluide entre avec un débit composé du débit Q de la pompe et du débit Q'. La vitesse de sortie de la tige est donc : V2 = (Q+Q')/(2.S), soit V2 = Q/(2.S) + (V2.S)/(2.S) .
On en déduit que V2 - V2/2 = Q/(2.S) soit : V2 = Q/(S) = V1 .
Ce montage différentiel permet donc de garantir une vitesse de rentrée et de sortie de la tige à la même vitesse avec une amplification de l'effort de commande qui assure donc une fonction d'assistance.
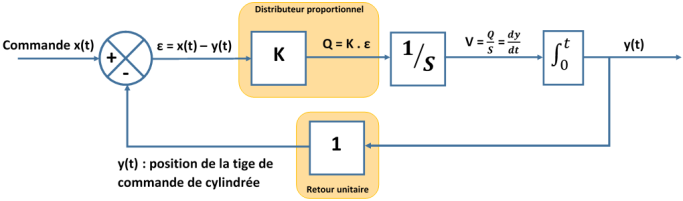
Cette disposition ne permet pas de contrôler la position x(t) du piston car elle dépend du temps et d'une position initiale x0 inconnue :
Pour contrôler parfaitement x(t), il faut créer une chaîne de commande fermée comprenant un retour de l'information de position. Ici, on peut obtenir ce résultat en reliant le déplacement du piston(ou de l'organe entraîné) au corps du distributeur. Pour encore mieux intégrer le système, on réalise parfois le distributeur dans le corps du piston.
On retrouve ici la notion de distribution proportionnelle pour lequel on obtient un asservissement en position avec une amplification de l'effort qui peut être très importante. Ce principe est utilisé dans les commandes de cylindrée de pompe.
