Robots de téléprésence et modalités en réunion mixte : repérages du conditionnement technologique de l'attention
Cet article interroge la notion de présence numérique et ses effets sur l'attention à partir de l'expérimentation de dispositifs de téléprésence, dont le robot BEAM®, réalisée dans le cadre d'un séminaire de recherche (Interactions Multimodales Par ECran). Cette recherche tend à identifier les effets de présence et interroge la manière dont les dispositifs techniques peuvent agir sur les interactions en présentiel et à distance. De ce fait, les notions de présence, d'attention et les formes d'engagement générées par ce cadre sont questionnées et analysées. Des formes d’attention sont repérées, qui semblent être fortement reliées aux effets de présence induits par le robot de téléprésence. Celles-ci paraissent également liées aux modalités d’interactions suscitées par le robot d’une part, mais aussi à la manière dont l’individu finit par « intégrer » physiquement le dispositif technique dû à l’effet de mobilité du dispositif robot. De plus, l’utilisateur du robot semble subir des contraintes techniques impactant ses interactions et les déterminant en fonction de l’environnement à distance. La parole devient alors là le fil conducteur de l’interaction à distance.
This article questions the notion of digital presence through the experimenting of telepresence devices, amongst which the BEAM® robot, in the context of a research seminar (Screen-Based Multimodal Interactions). This research project tends to identify presence effects and questions the way the technical devices can act on distance and onsite interactions. Thus, the notions of presence, attention and the forms of engagement generated in this context are questionned and analysed. Forms of attention are identified, seemingly strongly related to the presence effects induced by the telepresence robot. These forms of attention also appear to be linked to the interaction modalities triggered by the robot on the one hand, but also to the way the individual ends up physically “integrating” the technical apparatus due to the mobility effect of the robot device. Moreso, the individual using the robot seems to be under technical constraints impacting its interactions and determining the interactions with the distance environment. Speech seems then to be the guiding thread of the presence/distance interaction.
1. Introduction
La robotique connaît depuis quelques années, et plus précisément depuis les années 2010, une expansion assez importante dans divers domaines, notamment dans l'armée, la sécurité, mais aussi dans des domaines davantage liés à l'interaction homme-machine, comme le domaine du médico-social (en gériatrie, dans les EHPAD, etc.) (Michaud et al., 2010 ; Prakabar et al., 2013). De plus, Michaud et al. (2010, 751) expliquent qu'il existe des systèmes de téléprésence à domicile reposant simplement sur un équipement de visioconférence audio et vidéo téléguidable à distance et dont le fonctionnement nécessite avant tout une connexion internet à haut débit. Ainsi, il est possible de bénéficier d'information et de communication, tant verbale que non verbale, par la simple présence de ce dispositif, à travers la connexion à distance et les interactions avec la personne avec qui on échange. Cela permet aussi l'observation de l'environnement dans lequel évolue cette personne à distance. Il est ainsi envisageable d’élaborer une expérience de téléprésence par exemple avec des patients à distance, ou une communication, voire une surveillance, avec des personnes âgées à domicile pour maintenir un lien avec l’extérieur. Michaud et al. (2010, 752) mettent également en perspective cette expansion de la robotique par le développement de plusieurs systèmes de robot de téléprésence selon une diversité de domaine d'applications. Ainsi, ils citent Pearl conçu pour une assistance cognitive et d'orientation pour les personnes âgées, puis Sam de RoboCare créé pour un environnement interactif afin de gérer des activités quotidiennes dans lesquelles les actions du robot constituent les principales interactions avec la personne, etc. Michaud et al. (2010) expliquent également que tous les systèmes de robot de téléprésence ne sont pas élaborés pour les mêmes usages, la plus grande difficulté venant en effet des environnements complexes. Ainsi en va-t-il du domicile, du fait de l'aménagement des espaces intérieurs, du mobilier, de la configuration des espaces, des revêtements du sol, etc., qui ont de facto un impact sur la mobilité du robot et les modalités de navigation à travers le système de guidage de la personne à distance.
Ainsi, la société numérique d’aujourd’hui permet de maintenir des formes de communications interpersonnelles à distance, qui sont le résultat des évolutions des technologies communicationnelles (Compiègne, 2010) depuis de nombreux siècles et transforment les interactions sociales de manière continue. Cela interroge les notions de présence, d’attention et d’engagement que nous exposons ci-dessous avant de présenter le terrain, corpus et méthodologie qui nous ont permis de les étudier plus avant dans le cadre de cette recherche exploratoire.
2. Présence, attention et engagement
Nous exposons des définitions de la présence et de la téléprésence en écho aux régimes attentionnels (Boullier, 2009), à l’engagement (Relieu, 2013) et à l’allocation distribuée de l’attention (Rouby et Thomas, 2014).
Le Larousse définit la notion de « présence » en renvoyant d’abord à la matérialisation physique de la présence en lieu et temps, puis en renvoyant non plus à la dimension spatiale en tant que telle, mais à une dimension subjective et sociale de la présence, et enfin en mettant le doigt sur un phénomène subjectif qui est une présence sentie, pressentie, une forme de présence non matérialisée dans un espacetemps.
Au-delà, nous pouvons nous interroger sur ce que peut évoquer la présence dans une société numérique où les dispositifs techniques modifient les représentations de la présence ainsi que ses formes. On serait ainsi amené à distinguer « présence numérique » et « téléprésence » (Merzeau, 2010 ; Paveau, 2014 ; Vial, 2014 ; Ibnelkaïd, 2016), la « téléprésence » (voir ci-dessous) étant considérée du point de vue des personnes « en présence », tandis que la « présence numérique », dans une perspective post-dualiste, ne met pas le centre de gravité de l’interaction d’un côté ou de l’autre. L’interaction ellemême devient le focus, et non plus l’outil en soi ou les participants.
À propos de téléprésence, Weissberg (2001, 31) note : « Ce qui est difficile à penser c'est la recomposition c'est-à-dire le nouveau milieu issu de la techno-genèse numérique. » C’est cette recomposition même de l’espace médiatique que nous explorons à travers cette étude. La téléprésence sociale, quant à elle, est définie par Tsui et al. (2015) comme étant une situation de communication interpersonnelle dans laquelle l'usager échange avec un interactant à distance par écran interposé. Le degré auquel l'usager sent la téléprésence avec un interactant dans un environnement distant et réciproquement, dépend à la fois de la qualité des interactions homme-ordinateur de l'usager que celles entre homme-robot s’opérant à distance.
Quant à lui, Licoppe (2013, 2) pense la présence à l’aune de l’engagement. Il propose « de penser un rapport différent à la présence (entendue comme engagement dans la situation à travers une action qui se déploie dans l’ici et maintenant) et à l’existence (entendue comme capacité des êtres à perdurer de manière reconnaissable d’une situation à l’autre) ». Cet « acte d’exister » (Piette, 2009) se complexifie à l’ère du numérique, « marquée par une remise en cause de cet idéal de l’individu pleinement présent et absorbé, et différents efforts pour tenter de valoriser des formes différentes et distribuées de présence et d’engagement » (Licoppe, 2013, 65). La situation qui nous occupe permet d’explorer ces problématiques, parce que la présence du robot en est l’une des chambres d’écho.
Pour ce qui est de l’attention, certains auteurs l’abordent du point de vue des régimes attentionnels (Citton, 2014 ; Boullier, 2014). Ainsi, Grassin (2015, 81) s’appuie sur les régimes distingués par Boullier (2009) : alerte, fidélisation, projection et immersion. Ces régimes attentionnels font tous référence à la dimension technique, laissant présager un déterminisme technologique de l’attention. D’autres auteurs, notamment en gestion des organisations, voient l’attention à travers un système d’allocation distribuée (Rouby et Thomas, 2014). Pour Ocasio (1997), il s’agit d’un processus dynamique individuel et collectif qui passe par le repérage de signaux jugés pertinents à mobiliser dans l’action, puis par la construction de sens à partir de ces signaux pour aller enfin à la génération de réponses adéquates. La construction de sens nécessite de sortir du cadre prédéfini (Rerup, 2009). Elle implique la flexibilité à travers une prise d’initiatives décentralisées et des pratiques non conventionnelles inventées localement ; la proactivité consistant à « tâtonner », « bricoler » avec les indicateurs pour traiter les problèmes avant leur apparition et utiliser de manière « indisciplinée » les artefacts de l’organisation. Nous constatons des phénomènes similaires dans le cadre du séminaire multisite dont il sera question ici (Ibnelkaïd et Furnon, 2017).
Venons-en au terrain, corpus et méthodologie qui nous ont permis d’explorer plus avant les notions exposées ci-dessus.
3. Terrain, corpus et méthodologie
3.1. Le séminaire de recherche IMPEC
De fait, la question des TIC et du travail à distance renvoie à l'interrogation de la notion de « présence numérique » : est-ce que le dispositif technique contribue à lui tout seul à matérialiser cette forme de présence à distance ? Dans quelle situation le dispositif technique peut-il en effet être efficient pour matérialiser cette présence ? Ce sont ces questions que Develotte (2017) se pose depuis de nombreuses années dans le cadre d’un séminaire doctoral, lieu de formation à la recherche scientifique précieux pour les apprentis chercheurs tout autant que pour les chercheurs confirmés. La question de la mobilité de ces participants a été le point de départ de la mise en place du dispositif de téléprésence que nous étudions ici, afin de maintenir lien et travail scientifique avec des chercheurs étrangers ou en mobilité. Nous réinterrogeons les notions de présence, d'attention et de formes d'engagement suscitées par cette activité de réflexion et d'échanges collectifs qu'est le séminaire de recherche hybride. Il s'agit en effet par ce dispositif de comprendre si l'usage du robot de téléprésence peut permettre une inclusion plus importante et une participation plus active des doctorants et chercheurs à distance dans un séminaire thématique. Comme l’explique Develotte (2017, 7) :
« Les recherches liées à la téléprésence liée aux robots sont encore plus récentes et se retrouvent dans l’enseignement des langues (OhHun Kwon, 2010), mais aussi dans des manifestations comme les colloques scientifiques. C’est en effet le même robot Beam® que celui que nous avons utilisé dans le séminaire IMPEC que Neustaedter et al. (2016) viennent d’étudier pour en tirer des préconisations concernant son utilisation dans un contexte de conférence et pour pointer certaines difficultés comme celles qui sont liées à la construction de l’identité de la personne qui utilise le robot et à ses difficultés pour interagir socialement avec les autres participants. Ils se posent également la question de savoir quel est le nombre de robots utilisables dans la même conférence (leur expérience a été conduite sur trois robots utilisés en simultané lors de la même conférence). »
3.2. Le choix du robot de téléprésence Beam®
Dans le cadre du séminaire IMPEC (Interactions Multimodales Par Ecran), notre terrain d’étude, pour pallier aux difficultés de connexion de Google Hangouts®, plusieurs dispositifs de téléprésence incluant le robot Kubi®, Adobe Connect® et Beam® ont été testés (fig. 1)

Figure 1. A droite, le robot de téléprésence Beam® et à gauche, le robot Kubi®.
Dans le corpus constitué lors de ce programme de recherche, nous avons choisi d’étudier le robot Beam® car il inclut, plus que les deux autres dispositifs, mobilité et présence à distance. Ce robot de téléprésence, offre une mobilité dans l'espace, grâce à une base au sol roulante, une qualité audio grâce à un mini haut-parleur, et un écran de 9' tenu par deux tiges, avec une autonomie de 3h. Il nécessite toutefois une bonne connexion à un réseau, notamment 4G. S’il existe d'autres robots de télépresence mobiles tels que le Double® ou le Ubbo®, Beam® était déjà disponible dans une des structures participantes au programme de recherche. L'expérimentation porte sur l’évaluation en particulier de l’impact de la plus ou moins grande mobilité du robot dans l’implication des interactants.
3.3. Le dispositif technique
- Note de bas de page 1 :
-
Ce travail s’inscrit dans le programme de recherche « Présences numériques » piloté par C. Develotte responsable du groupe de recherche « IMPEC » (Interactions multimodales par Écrans) au sein du laboratoire ICAREns. Les membres de ce programme de recherche sont : Amélie Bouquain (doctorante, ICAR), Tatiana Codreanu (docteure, Institut Français Londres, associée ICAR), Christelle Combe-Celik (Mcf, Université Aix Marseille 5, LPL), Christine Develotte (P.U., Ens Lyon, ICAR), Morgane Domanchin (doctorante, Lyon 2, ICAR), Mabrouka El-Hachani (Mcf, Lyon 3, Elico), Dorothée Furnon (doctorante, Lyon 2, ECP ), Jean-François Grassin (Mcf, Lyon 2, ICAR), Yigong Guo (doctorant, ENS de Lyon, ICAR), Samira Ibnelkaïd (ATER, univ. de FrancheComté, associée ICAR), Françoise Poyet (P.U., Lyon 1, Elico), Joséphine Rémon (Mcf, Lyon 2, ICAR), Caroline Vincent (post-doctorante, Ifé, EducTice), Liping Zhang (Mcf, Zhejiang Gongshang University, Chine, associée ICAR).
Cette expérimentation organisée sous forme de séminaire bâti sur un programme de recherche questionne la notion de présences numériques en présentiel et distanciel. Ce séminaire multisite à présence instrumentée1 se déroule dans une salle dédiée à l’IFé, tandis qu’une participante est présente à travers un robot de téléprésence Beam® et que d’autres participent à travers Adobe Connect®.
Nous présentons ci-dessous (fig. 2) un schéma montrant la configuration du dispositif technique mis en œuvre pour cette expérimentation :
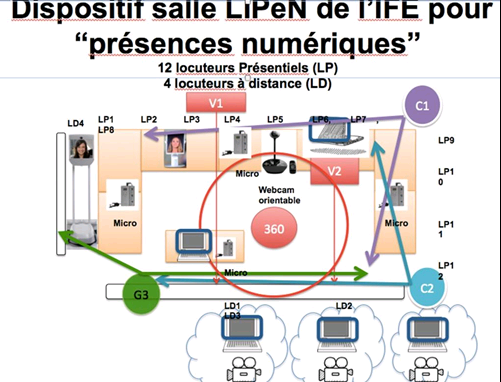
Figure 2. Illustration du plan de la salle LiPeN.
Sur ce plan, figurent à la fois les locuteurs présentiels (LP) et les locuteurs à distance (LD), ainsi que l’installation technique composée de caméras (C1 et C2, Gopro3 et 360), de micros et de vidéoprojecteurs au mur (V1 et V2). Le vidéoprojecteur (V1) a pour objectif de montrer au mur l’image des participants via Adobe Connect®, le vidéoprojecteur (V2) sert quant à lui aux présentations PowerPoint des conférenciers ou participants.
Voici une photo du dispositif (fig. 3) lors d’un séminaire :

Figure 3. Séminaire avec un robot de téléprésence.
Le séminaire se déroule dans une salle équipée de caméras et de micros susceptibles de couvrir au maximum la complexité de la coprésence des participants en présentiel (environ 12 personnes), celle des participants via Adobe Connect® (4 personnes dont l’image est projetée sur le mur), le(s) participant(s) par robot(s) (Beam® et/ou Kubi® selon la session).
Par ailleurs, les participants à distance enregistrent leur écran (capture dynamique d’écran) et leur propre corps devant l’ordinateur (par une caméra externe).
3.4. Corpus, méthodologie et problématique
La méthodologie s’appuie sur un croisement entre les données comportementales (recueillies par les enregistrements vidéo) et sur celles issues des entretiens/questionnaires proposés aux participants, tant les utilisateurs habituels que d’autres occasionnels d’un même outil pour pouvoir comparer les ressentis et documenter l’habituation à un système. À ce stade exploratoire, nous avons choisi les propos d’une participante « candide », nouvelle utilisatrice, à partir desquels nous tentons de saisir les particularités du dispositif, en les croisant avec les caractéristiques relevées auparavant par d’autres chercheurs.
Notre objet d’analyse est donc composé des segments d’interaction ou des extraits d’entretiens donnant à voir cette dynamique.
- Note de bas de page 2 :
-
Le prénom de la participante n’a pas été modifié.
- Note de bas de page 3 :
-
Les données sur les autres participants sont disponibles, mais nous ne pouvons tout présenter dans le cadre de cet article.
Nous avons donc sélectionné une session d’environ 50 minutes qui était matériellement constituée de deux vidéos, celle du groupe en présentiel, et celle de la participante sur Beam®, Amélie2, vue depuis la caméra de chez elle. C’est sa première participation au séminaire à travers ce dispositif de téléprésence. Le choix de ce dispositif à son profit est motivé simplement par l’impossibilité de venir au séminaire présentiel à cause de son travail3.
Nous nous sommes bien-sûr interrogés, tout au long de la captation des données, sur la conscience qu’ont les participants d’être filmés dans cette quasi auto-expérimentation, qui demeure un aspect que nous gardons toujours à l’esprit dans nos analyses.
Notre problématique interroge donc l'hypothèse selon laquelle l'usage du robot de téléprésence va permettre d'agir sur l’inclusion dans cette activité participative de travail qu'est le séminaire. Au contraire des plateformes de visioconférence, la question de l'engagement via la projection de la présence à distance accroît l'attention et met en position d'engagement soutenu et actif les participants, au prix de multiples ajustements dont quelques-uns se dessinent dans notre analyse ci-dessous.
Les caractéristiques du dispositif de téléprésence Beam® telles que relevées notamment par Neustaedter et al. (2016) et par Takayama et Go (2012) permettent de décrire le conditionnement opéré par la forme médiatique spécifique de ce robot particulier. C’est en effet à partir des caractéristiques dégagées par ces auteurs que nous avons abordé le corpus.
4. Les caractéristiques du dispositif de téléprésence
4.1. Langage corporel : perte du contrôle de la présentation de soi
Neustaedter et al. (2016) documentent la participation à une conférence par le dispositif de téléprésence Beam®. Une caractéristique du dispositif Beam® est qu’il ne mobilise pas le langage corporel habituel, que ce soit les regards, la position ou la direction. De là découle une perte du contrôle de présentation de soi, la difficulté à percevoir son propre niveau sonore et le manque d’autonomie par rapport au contexte élargi. Ces auteurs indiquent que pour les participants en présentiel, la présence du robot donne parfois l’impression que quelqu’un est debout dans la pièce et crie.
Le conditionnement opéré par le Beam® en tant que forme médiatique s’inscrit également dans la rencontre de deux contextes sociaux avec mélange de métaphores, ce qui contribue également à un brouillage pour les participants.
4.2. Rencontre de deux contextes sociaux
Plusieurs caractéristiques du dispositif de téléprésence Beam® renvoient en effet à la rencontre de deux contextes sociaux, comme l’indiquent Neustaedter et al. (2016). L’intime rencontre le social, et le privé le professionnel. Cette dualité a des conséquences sur l’attention à l’habillement, sur la gestion du micro, avec le risque d’oublier de le couper lorsqu’à distance certaines interactions relèvent du contexte privé. La préservation de l’intimité ou de la solitude passent par des actions supplémentaires, non implémentées par défaut. Nous sommes dans un régime où c’est la proactivité et non la passivité qui protège.
4.3. Mélange de métaphores
Avec l’introduction du robot de téléprésence Beam®, les normes sociales sont donc bousculées. Pour Takayama et Go (2012), ceci est dû en partie au mélange de métaphores impliquées dans ce dispositif : le robot est aussi bien vu comme un humain, un ordinateur, un écran, un mode de transport, un outil. Ainsi, la métaphore reste instable : est-ce un lieu, un poste de commandement, un robot ?
De ce conditionnement opéré par la forme médiatique (Amato et Perény, 2017) du dispositif de téléprésence découle un régime d’attention spécifique. Ce régime est conditionné par le caractère émergent des règles d’interaction dans ce contexte brouillé. Nous proposons des pistes pour caractériser ce conditionnement ainsi que les régimes de présence et d’attention associés à l’engagement dans ce dispositif numérique. La présence numérique est-elle contrainte par la technologie, en quoi revêt-elle une forme d'engagement ? En quoi l'usage du robot de téléprésence modifie-t-il notre présence, notre engagement, et quels sont ses effets de présence ?
5. Résultats
5.1. Remise en question des règles d’interaction
Le conditionnement opéré par le dispositif Beam®, qui remet en question les règles d’interaction, se manifeste à plusieurs niveaux. Le robot se caractérise par exemple par son incapacité à s’asseoir, que nous retrouvons dans l’entretien réalisé auprès de la participante utilisant Beam®, Amélie : « J’suis pas assise déjà, j’suis debout mais j’suis assise chez moi : dans le robot j’ai l’impression d’être debout par contre ». Se tenir à l’avant, debout, est une position privilégiée socialement et se l’arroger indirectement provoque donc le sentiment d’être impoli envers autrui. Amélie en est consciente puisqu’elle le mentionne dans son entretien : « Je gêne, j’occulte quelque chose ».
Le langage corporel habituel ne fonctionne donc pas. Amélie indique en entretien : « C’est pas assez précis pour que je me dise : tiens là, y a telle personne qui s’apprête à prendre la parole ». D’autre part, il n’y a pas de possibilité de se voir pour comprendre comment on est perçu. « Dans le robot, j’peux pas me planquer », dit Amélie ; « j’avais demandé [...] combien je mesurais avec le robot ». Enfin, le participant n’a pas de contrôle sur la présentation acoustique de soi, sur le niveau sonore en sortie. Ainsi, lorsqu’Amélie éternue chez elle, l’effet est démultiplié en présentiel.
L’expérimentation confirme de plus une dialectique entre l’intime et le social pour le participant avec robot et son entourage. Cette dualité a des conséquences, notamment sur l’attention à l’habillement (Amélie indique se préparer comme si elle allait « en extérieur »). « Un robot qui mange, on va pas tenter » (indique Amélie, qui parle d’« intrusion dans son intérieur », d’autant plus qu’elle est filmée chez elle en train de piloter le robot Beam®, pour les besoins du corpus. L’autonomie, de même, ne va pas de soi. Amélie le formule quand elle indique : « J’suis arrivée quand on m’a branchée » ou en utilisant des expressions comme « on m’avait mise… ». Ce brouillage du langage corporel et des sphères personnelles s’accompagne d’un brouillage des métaphores. Elle évoque ainsi « une chute brutale », « boum, c’est l’rideau quoi ». Pour elle, « y a pas une déconnexion lente », « y a la connexion ou la déconnexion ». Elle commente : « Je retourne dans l’espace-temps où y a mon corps ».
Ces brouillages, au-delà de leur acceptation comme inhérents au dispositif, donnent lieu à l’obligation d’une redéfinition des règles d’interaction, dans un espace médiatique où la parole semble rester hégémonique, probablement en rapport avec son rôle central dans un séminaire.
5.2. Espace médiatique
Cette obligation de redéfinition des règles d’interaction mène à la constitution dynamique d’un espace médiatique - espace de partage d’informations (ou media space) (Li et Robertson, 2011) - qui se distingue de l’espace physique, au sein duquel attention et engagement déterminent des régimes de présence renouvelés. Dans le cadre d’un séminaire de recherche avec présence instrumentée, la construction de l’objet commun est ainsi indissociable de la construction de l’espace médiatique dans une convergence d’intentions. Amélie vivant la situation à travers Beam® pointe une pluralité d’espaces d’interaction : « Entre ceux d’Adobe et moi, y a pas d’interaction », « y s’font des blagues des trucs comme ça, j’aimerais bien participer à ce genre de choses ». En dépit de cette pluralité finalement constitutive de l’espace médiatique, les interlocuteurs tendent toujours à œuvrer au rétablissement de la communication en vertu de la convergence d’intentions, elle aussi fondatrice (Beers Fägersten, 2010).
5.3. Régime d’attention centré sur la parole : présence furtive ou injonction de présence
- Note de bas de page 4 :
-
Le prénom a été modifié.
Au cœur de cette dynamique de réinvention des modalités d’engagement, le régime d’attention se centre sur la parole, qui reste à la fois un enjeu de pouvoir, et une injonction lorsqu’elle convoque l’attention du robot de téléprésence. Paradoxalement, la présence du robot est furtive : « Les gens se rendent pas forcément compte que j’suis arrivée » dit Amélie. Elle semble s’amuser de cette possibilité, mais formule aussi le désir d’être incluse dans les interactions : « Si on nous donne pas la parole, on n’est pas là ». Le robot est à la fois ostentatoire, dans ses positionnements et ses déplacements, mais furtif quand il est silencieux. Dès lors, le passage du silence à la prise de parole n’est pas anodin, et peut être perçu comme une exposition exagérée. Lorsque la chef de séance décide de « donner la parole à distance » en demandant « vous avez des choses à dire ? Amélie, Laetitia4 ? », cela est mal perçu par Amélie, comme elle le signale en entretien, d’autant plus qu’elle est seule derrière le robot Beam® alors que plusieurs participantes utilisent ensemble un autre dispositif de communication à distance intitulé Adobe Connect®. La distribution de la parole semble être vécue comme une injonction de présence ou une injonction d’attention, alors que parallèlement c’est bien la distribution de la parole qui rend présent les participants. En dépit des médiations technologiques ou à cause d’elles, le fil rouge reste la parole. L’attention, c’est l’attention à la parole, alors même que la présence est instrumentée en fonction d’elle. En effet, les contraintes techniques l’amènent à se déplacer et se placer face aux personnes qui s’expriment pour mieux les entendre, suivant un guidage par la voix : « Ceux qui prennent plus souvent la parole, on arrive à les identifier » précise Amélie. Les alertes écrites dans le chat d’Adobe Connect® servent pour partie à indiquer des dysfonctionnements du son. Ainsi, attention générale et attention à la voix se confondent, tandis que son, voix et parole sont bien distincts. Les réglages de son peuvent être cause de frustrations, tandis que chacun espère que sa voix soit entendue pour que sa parole soit prise en compte.
6. Conclusion : les trois piliers de l’espace médiatique attentionnel
Nous avons pu voir, à travers les déclarations d’une participante par dispositif de téléprésence, que les règles d’interaction sont bousculées dans le contexte qui nous préoccupe. L’espace médiatique qui en résulte est en constante redéfinition autour de la circulation de la parole et d’injonctions ou d’évitements attentionnels. L’espace médiatique se dessine ainsi avant tout comme une convergence d’intentions de construction de cet espace, et d’attentions fluctuantes. L’espace médiatique, que l’on pourrait aussi appeler espace attentionnel, est ainsi un espace qui semble devoir être construit dynamiquement sur trois piliers :
-
l’acceptation des perturbations (5.1),
-
une intention convergente de réussite, de synchronisation (5.2), - une primauté de la parole (5.3).
Ces trois piliers semblent se décliner à travers un régime attentionnel paradoxal, entre furtivité et exposition, et entre injonction et pouvoir : devoir couper son micro, ou pouvoir couper son micro (furtivité). Ce que ne peuvent pas faire les participants en présentiel, à moins de chuchoter. D’un côté, vouloir être présent sans être exposé, de l’autre, être présent sans injonction de présence.
Ces formes d’engagement ou de réticence semblent être fortement reliées aux effets de présence induits par le robot de téléprésence et aux modalités d’interactions suscitées par le robot d’une part, mais aussi par la manière dont l’individu finit par « intégrer » physiquement le dispositif technique dû à l’effet de mobilité du dispositif robot. De plus, l’individu qui utilise le robot semble subir des contraintes techniques impactant ses interactions et déterminant celles-ci avec l’environnement à distance.
Nos observations nous ont donc permis de voir se dessiner un régime de présence et d’attention entre furtivité, désir et injonction, dans lequel le « conditionnement opéré par la forme médiatique » est tour à tour créateur de frustrations ou créateur de sens. Comme l’indique en entretien la participante utilisant Beam® : « M’déplacer pour m’déplacer, si les autres y perçoivent pas du sens, ça peut perturber ».
Ces déterminations technologiques de l’attention font émerger un prérequis de convergence d’intentions ainsi qu’un prérequis d’acceptation des dysfonctionnements technologiques, à explorer plus avant dans la suite de nos analyses, dessinant un « émergentisme » des règles d’interaction dans un contexte où les normes sociales sont en cours de redéfinition « au fil de l’eau ».