- Note de bas de page 1 :
-
Colloque IMPEC (Interactions Multimodales Par ECran) : https://impec.sciencesconf.org
Linguiste et spécialiste de la communication multimodale par écran, Susan Herring (Indiana University, États-Unis) a posé les fondements du champ théorique de l’Analyse du Discours appliqué à la Communication Médiée par Ordinateur (CMDA) (Herring, 2004). Lors de son intervention à distance au colloque IMPEC1 le 2 juillet 2014 à Lyon (France), alors qu’elle se trouvait aux États-Unis, Herring testait un nouveau mode de communication interactif et multimodal, à travers sa conférence via le robot de téléprésence stationnaire « Kubi ». L’article « New frontiers in interactive multimodal communication » (2015) s’inscrit dans la continuité de la réflexion menée au colloque IMPEC. Cet article a pour objectif d’exposer deux phénomènes émergents liés à la multimodalité dans les communications en ligne : les plateformes multimodales interactives (Interactive Multimodal Platforms, désormais IMP) et la communication médiée par des robots de téléprésence (Robot-Mediated Communication, désormais RMC).
Avec le développement des nouvelles technologies, ces deux dispositifs tendent à se multiplier. Ainsi Herring invite les chercheurs à étudier ces formes de communication qui constituent de nouvelles données pour l’analyse multimodale du discours.
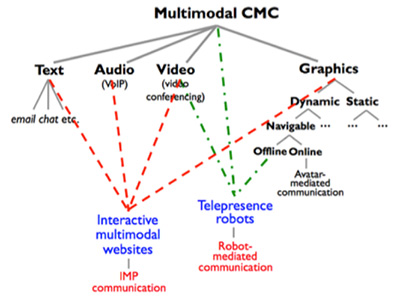
À première vue, ces deux notions semblent aux antipodes, ainsi Herring souligne la nature divergente de ces phénomènes : en tant que sites internet, les IMPs sont logés en ligne, tandis que la RMC fait appel à des robots de téléprésence, qui sont des objets mécaniques. Cette différence influence également le type d’interactions que proposent ces dispositifs : l’un offre des interactions pérennes et souvent asynchrones, tandis que les interactions médiées par robot ont lieu in-vivo, ne laissant aucune trace verbale. Cependant, Herring précise ce sur quoi ces deux dispositifs convergent, notamment à travers la possibilité de « médier » des interactions en connectant des participants à distance, tout en leur proposant une variété de modes communicationnels. À ce propos, Herring dresse un schéma synthétique regroupant les modalités proposées par ces deux dispositifs.
À première vue, on remarque la diversité des modalités proposées par les IMPs. En ce sens, Herring définit cette notion comme « des plateformes web 2.0 qui soutiennent une convergence de modalités (textuelle, audio, vidéo, graphique), permettant une communication entre participants » (2015 : 1, notre traduction). Elle ajoute que les IMPs « permettent aux usagers des médias sociaux de s’exprimer selon différents modes sur un site internet – et cela, dans une seule conversation » (ibid.). Herring spécifie ensuite la nature de ces modes : « les IMPs impliquent au minimum la modalité textuelle ainsi qu’un autre mode (audio, vidéo et / ou graphique). Les modes concernés peuvent être synchrones ou asynchrones » (2015 : 2). Enfin, Herring insiste sur le fait que tous les sites web 2.0 ne sont pas nécessairement des IMPs : les sites sur lesquels les messages sont principalement textuels (sans compter les pièces jointes multimédias), tels que Wikipédia et Twitter, ne sont pas considérés comme des IMPs (2015 : 2). Au contraire, Herring considère la plateforme YouTube comme un exemple d’IMP, puisqu’elle permet aux usagers de commenter une vidéo partagée de manière asynchrone, à travers le choix de deux modalités : textuelle ou vidéo.
Figure 1 : Multimodal computer-mediated communication
Un robot de téléprésence est une plateforme mobile composée d’une interface sonore et visuelle, permettant à son utilisateur de piloter ce dernier à distance. La RMC est donc définie comme « un mode de communication homme-homme médiatisé par un ou plusieurs robot(s) de téléprésence, qui implique toute une pluralité de modalités à travers l’audio, la vidéo et plus particulièrement la mobilité du robot dans l’espace physique » (2015 : 1, notre traduction).
À travers cette multitude de modalités proposées, les robots de téléprésence brouillent les frontières avec la communication médiée par ordinateur. Herring illustre cette complexité dans sa tentative d’expliciter la nature de la RMC. D’une part, elle identifie la RMC comme un type de communication médiatisée par un avatar. Ce dernier ne s’apparenterait pas à un avatar tel que l’on pourrait voir dans un monde virtuel, il serait au contraire représenté par un robot en libre déplacement. D’autre part, si la RMC s’apparente davantage à un dispositif de communication médiée par visio-conférence, complétée par le mouvement physique d'un robot, elle offre à l'utilisateur un sentiment d'être « plus présent » que dans la communication via visio-conférence (Rae et al., 2014).
La complexité des modalités de communication constitue une source de données riches, suscitant ainsi de nouveaux défis méthodologiques. La recherche sur les IMPs pose le problème du traitement des données vis-à-vis de la coexistence simultanée de différentes modalités de communication sur la même plateforme, dans la même interaction et dans le même message (2015 : 2). Herring suggère ainsi de développer une approche empirique selon laquelle le chercheur analyse les différentes modalités les unes par rapport aux autres, à travers un ensemble de questions de recherche et méthodologies. Une telle approche pourrait permettre de comparer les modalités utilisées par les usagers sur les interactions, et sur les plateformes. Si les IMPs offrent différents modes de communications, il s'agirait d'exploiter comment et pourquoi les usagers interagissent à travers ces modes en particulier. Se pose ensuite la question de l'impact de l'utilisation de ces modes sur la présence sociale. Quelle(s) impression(s) donnent-ils aux participants ?
L’analyse de la RMC engendre des difficultés à plusieurs niveaux : d’abord, se pose le problème éthique lors du recueil des données, la présence du chercheur pouvant inévitablement perturber l’espace écologique et modifier les interactions hommes-robots. En outre, étant donné que les traces de RMC ne sont pas auto-archivées, le chercheur devra concevoir des méthodes pour enregistrer, transcrire et présenter les données, la nature de celles-ci étant spécifique par rapport aux recherches plus traditionnelles étudiées en CMDA. En tant que nouveau phénomène encore peu traité, les pistes de réflexions pour les futures recherches en RMC sont nombreuses : comment les participants gèrent-ils les communications médiatisées par robot ? Comment les participants à distance attirent-ils l’attention ? Quel est leur statut hiérarchique par rapport à ceux en présence ?
En conclusion, l’étude des IMPs et des RMCs constitue de nouvelles données « fortement multimodales » (Develotte et al., 2011), ouvrant bien des pistes de recherche dans le domaine de la CMDA.
Les réflexions mises en avant dans cet article s’inscrivent dans la continuité des travaux de l’équipe de recherche du séminaire IMPEC, dirigée par Christine Develotte, s’intéressant aux différents types de qualités de présence à travers divers dispositifs : robots de téléprésence et visio-conférence.