Amicalité des robots de compagnie
Une poïétique par le design Friendliness of companionship robot: a poietic by design
Cette recherche interroge les robots de compagnie sous l’angle du design, elle questionne leur inscription en Occident et les caractéristiques favorables à la construction d’une relation d’amicalité. Enclavés dans une représentation stéréotypée du robot esclave-ménager, les robots tendent pourtant à développer un nouveau type de relation, une expérience de plaisir et d’échange amical avec l’usager. Dans cette recherche empirique, les robots sont étudiés dans une perspective artistique transversale, la démarche entremêle un savoir-faire graphique, des expérimentations plastiques et des expérimentations qualitatives et quantitatives menées auprès du grand public. Lors de l’interaction directe avec Aibo, le panel valide des qualités affectives et une présence divertissante. Les robots de compagnie posent alors les bases d’une typologie plus vaste, une espèce amicale de jouets destinés aux adultes, favorisant une interaction plaisante et une expérience fictionnelle : les jouets expérientiels.
This research critically examines the notion of design in companion robots. Chiefly investigating the role companion robots play in Western societies and which of their characteristics are responsible for developing friendly relationships.As companion robots are locked in a stereotypical representation of slave or household robots, it is necessary to develop a new image through experimentation and design. Our empirical research looks at robots through an artistic lense by using a cross-sectional approach interweaving graphic skills, visual experiments and qualitative and quantitative experiments. Our experiments with Aibo, a robot, verify the affective qualities of the robot as well as measures various aspects of its appearance. Companion robots lay the foundations for a broader typology : a kind of friendly sophisticated toy for adults that we call experiential toys.
1. Introduction
L’accessibilité récente des robots au niveau du grand public, avec la commercialisation d’Aibo, le robot chien de Sony dès 1999, remet en question la perception des robots ayant une dimension plus familière. Comment les robots de compagnie s’inscrivent-ils en Occident ? Il s’agit d’interroger les dimensions d’acceptation culturelle des robots par le grand public (considéré comme une cible potentielle d’usagers) et dans les foyers. Ces objets technologiques, sans histoire, sans rôle social, sans identité, apparaissent totalement dénués de sens dans un contexte culturel occidental. Issus d’une technologie de pointe, ils émergent dans une dimension complexe et une culture d’usage provenant principalement d’Extrême-Orient. Cette complexité est imprégnée d’un univers de fiction stéréotypé à la fois symbolique d’un progrès bénéfique et objet de crainte. Des exemples symptomatiques au succès international permettent d’illustrer ce propos : les robots esclaves présentés dans la pièce de Karel Capek (1921), le Terminator perfide de James Cameron (1985), le R2D2 multifonctionnel de Star Wars (1976). La représentation des œuvres fictionnelles est importante du fait que plusieurs millions d’Américains, d’Européens, d’Asiatiques sont conscients de ces images. La popularité de ces longs métrages dans plusieurs contextes culturels et particulièrement celle de R2D2 dans Star Wars façonne une représentation fictionnelle des robots. Aussi, le robot enfant David dans Intelligence Artificielle (Spielberg, 2001) ou encore les Replicant de Philippe K. Dick (1968) contribuent à créer une confusion des rôles auprès du public : la faculté de réversibilité de la machine-humanoïde est inquiétante tandis que les apparences d’ersatz humain sont troublantes.
Les robots de compagnie, actuellement produits et commercialisés, sont capables de divertir, de jouer et d’interagir avec leur propriétaire. Leurs fonctions sont diverses : message (alerte mail), accueil et surveillance des foyers (webcam), divertissement (danse) et jeux ludo-éducatifs (apprentissage, éveil et aide devoirs pour les enfants). Il existe autant de dérisions qui attirent notre curiosité et entraînent des difficultés à identifier cet objet. Capricieux, ils exécutent ou non les ordres, ils s’enrichissent de données et emmagasinent ainsi les préférences de leur utilisateur. Selon la fréquence et le type d’utilisation, un robot développera un caractère plus joueur, tandis qu’un autre sera studieux ou serviable.
La validité et l’usage des robots de compagnie dans la société contemporaine restent à l’état expérimental en Occident mais un robot chargé de tenir compagnie est-il pour autant considéré inutile ? Une difficulté taxonomique émerge : comment dire et nommer ces artefacts mécaniques qui veulent devenir de bons compagnons dans notre quotidien ? Un vocabulaire spécifique fait défaut afin de qualifier leur statut et le type de relations envisageables. Lorsque les robots sont intégrés dans les foyers, leur mode existentiel n’est plus relatif à un rôle attribué par la science-fiction, sa modalisation dans le quotidien est à construire.
Si les technophiles favorisent la démonstration d’une technologie de pointe, comment qualifier les rapports que le grand public pourrait entretenir avec eux ?
- Note de bas de page 1 :
-
Un rapport d’efficacité des tâches réalisées. Cette efficacité est peut être également destinée à améliorer le quotidien, elle est applicable au quotidien, c’est ici une problématique de design.
Les robots de compagnie émanent d’un projet interdisciplinaire, leur importante connotation technique les confine fréquemment à un rapport d’efficacité1. Dès lors, la conception d’un robot lié à une notion de plaisir et d’échange amical plutôt qu’à une tâche de travail, impose le process design comme valeur initiale au projet.
Il est question de décloisonner cet univers robotique complexe et de le mettre en perspective dans le projet design : un objet cohérent dans un projet humain et social. Dans le cadre d’une réflexion émanant des problématiques fondamentales de la discipline du design, l’objet de cet article consiste à mesurer et à qualifier les expériences utilisateurs favorables à l’acceptation sociale et domestique du robot. Ces expériences nécessitent de définir une typologie d’objets amicaux et de les interroger dans une démarche poïétique et esthétique.
- Note de bas de page 2 :
-
Créateur de robots et personnage principal d’une première mise en scène théâtrale avec des robots dans la pièce de Capek, Op. Cit.
Loin du rapport maître/esclave de type soumis, nous adoptons la posture du père Rossum2. Ce dernier envisage le robot comme un ami, contrairement à son fils qui les exploite comme des esclaves. Dans cet axe, nous tentons de déceler les caractéristiques comportementales et esthétiques favorables à l’établissement d’une relation de nature amicale.
Le psychiatre et psychanalyste Winnicott a démontré que les objets transitionnels résolvent une double interrogation concernant la séparation entre l’enfant et sa mère, et sa transition (1971) : la relation entre moi et le monde. Ces objets engendrent également un rapport au fétichisme et à l’objet A lacanien. Dans ce rapport entre moi et le monde, les robots de compagnie favorisent les liens entre les dimensions réelles et fictionnelles, nous nous sommes donc appuyés sur cette théorie mais dans le cadre de cette recherche, le concept de la théorie freudienne ne correspond pas. Notre objet d’étude en démontre les limites dans une situation empirique. Il s’agit alors de lui substituer un nouveau concept, nous utilisons le terme d’amicalité.
- Note de bas de page 3 :
-
L’amicalité renvoie également aux notions de : machinité, ce vers quoi l’homme pourrait mais ne souhaite pas tendre par le biais de la mécanisation et l’industrialisation ;animalité, la dimension animale dans l’humain. Les trois notions questionnent perpétuellement les limites de l’humain (D. Lestel, 1996) et discutent du rôle de la technique, de la technologie dans l’homonisation (Leroi-Gourhan, 1968 ; B. Stiegler, 1994).
- Note de bas de page 4 :
-
Il ne s’agit pas d’un sentiment amoureux tel que le montre P. K. Dick (1968) ou Ridley Scott (1982) dans un univers qui met en abîme l’ersatz dans la réalité et inversement.
L’amitié, la philia d’Aristote, est réservée à une relation de réciprocité entre humains, forte de sentiments fraternels et bienveillants, dans un cadre éthique digne et confiant. L’amicalité se réfère à une relation génératrice de sens pour l’humain et s’inscrit dans une dimension anthropologique3. Elle définit alors un nouveau rapport entre l’artefact et l’humain, elle comprend et alterne les dimensions de réalité et de fiction dans lesquelles elle s’exerce4. Le robot de compagnie n’est donc pas un ami virtuel mais un objet avec lequel l’usager développe une complicité. Un objet capable de plonger l’utilisateur dans une expérience plaisante et enrichissante : évasion, fiction, amusement, conversation. Des affinités qui amèneraient à moduler l’état affectif de l’usager vers des réactions positives. Pour le designer, il n’est pas uniquement question de s’attacher à la forme d’un artefact doté d’intelligence artificielle, avec toute la complexité que Mori (1970) a déjà démontré à travers « l’uncanny valley », mais de designer des scénarios d’usage, des activités et expériences en fonction des contextes spatiotemporels.
- Note de bas de page 5 :
-
À travers le catalogue « Good Goods » (1999), Starck proposait des « non produits pour des non consommateurs » (Sous la dir. Centre Georges Pompidou, B. Heilbrunn, « Le grand designer. Petit précis de philosophie starckienne », dans Ecrits sur Starck, éditions du Centre Georges Pompidou, Paris, 2003, p. 32.). Le designer y questionnait une redéfinition de l’objet par le biais d’un ré-enchantement poétique des pratiques du quotidien : en augmentant l’attachement aux objets, le foisonnement d’objets pourrait alors diminuer (Centre Georges Pompidou, 2003).
- Note de bas de page 6 :
-
1991, pour l’éditeur italien Alessi.
- Note de bas de page 7 :
-
Teddy Bear Band (1990), distribué sur le catalogue « GoodGoods » pour La Redoute.
- Note de bas de page 8 :
-
Les productions starckiennes sont toutefois spécifiques, le designer se situe dans une dimension créative poreuse très proche de l’artiste. En pratique le presse agrume est davantage un objet signé « Starck » à exposer dans sa cuisine tel un objet d’art que l’on rapporterait du musée.
- Note de bas de page 9 :
-
Jacques Hondelatte, (architecte, 1942-2002), évoque également l’amicalité des objets dans leur propension à habiter nos rêves et à générer nos mythes. Dans cette étude, l’amicalité relève de la qualité de la relation établie avec les objets, et sollicite les dimensions virtuelles, fictionnelles et réelles de l’artefact.
- Note de bas de page 10 :
-
Le « Teddy Bear » offre par exemple diverses discussions possibles en fonction de la relation avec une des quatre têtes, celle du lapin, du chien, du mouton, de l’ourson, ou encore de l’unité d’ensemble que forment les quatre têtes.
Ce rapport d’amicalité n’est pas si éloigné de la relation valorisée par Starck5 avec son presse agrume « Juicy Salif6 » ou encore avec son ourson à quatre têtes « Teddy Bear7 ». Lorsque Starck précise que la forme araignée du presse agrume « Juicy Salif » n’est pas destinée à esthétiser la fonction du presse agrume mais à ouvrir un dialogue avec l’usager, l’intention d’instaurer un nouveau rapport avec l’artefact est posée8 vers l’amicalité des objets9. De la sorte, le designer nous interroge : et si les objets ne se situaient pas uniquement dans la quotidienneté mais plutôt dans diverses fictions qui les font parler10 ? Il apparaît alors un univers poétique et atypique dans lequel les objets ne sont plus objets de surconsommation mais de conversation.
2. Méthodologie de travail
Dans cette recherche originale et empirique, les robots sont étudiés dans une perspective artistique transversale. La démarche de travail entremêle un savoir-faire graphique, des expérimentations plastiques, des expérimentations qualitatives et quantitatives menées auprès du grand public. La méthodologie développée ici s’appuie sur un répertoire ethnométhodologique des robots étudiés (Cardoso, 2009).
- Note de bas de page 11 :
-
Les concepts choisis représentent un éventail des robots susceptibles de tenir compagnie : du prototype (Leonardo) au robot commercialisé (Aibo, le robot chien) en passant par le robot célèbre figure de film de science-fiction (R2D2).
- Note de bas de page 12 :
-
Nabaztag n’est pas un robot mais un objet communicant, celui-ci pourrait se substituer à un robot de compagnie, nous avons alors voulu vérifier sa validité auprès du panel en l’insérant parmi les robots de compagnie.
- Note de bas de page 13 :
-
Le panel, composé de 60 personnes (Français et Québécois) dont 40 % salari, se situe entre 25 et 35 ans. 70 % des personnes sondées sont des hommes et 35 % sont attirés par les technologies.
Dans un premier temps, une enquête de perception menée en ligne auprès d’un public francophone a permis d’évaluer huit concepts de robots de compagnie du zoomorphe à l’anthropomorphe11 (figure 1) : Aibo et Qrio (Sony, 2003), Leonardo (MIT, 2004), PaPeRo (Nec, 2001), Nabaztag (Violet, 2005)12, Carobot, (Alsok, Japan, 2004), Actroid (Osaka University, 2005), R2D2 (Star Wars, 1974). Dans l’optique de mesurer l’acceptation culturelle, il s’est avéré pertinent d’évaluer la perception des robots de compagnie en Occident13 à partir de leur iconographie. L’objectif consistait à cerner le registre de référence sémantique perçu par le public et à évaluer les fonctionnalités des concepts à partir de leur représentation. Dans le cadre de cet article, nous ferons uniquement usage de la synthèse des résultats obtenus :
Figure 1. Concepts choisis enquête 1

Ils ont révélé une association systématique des robots de compagnie aux tâches ménagères. Les répondants sont manifestement nourris par le fantasme des années 1950 qui visait à libérer les ménagères par l’arrivée d’une technologie progressiste. Ils expriment également l’influence de la science-fiction quant à l’importance de la figure de R2D2. Sur l’échelle du différenciateur sémantique, R2D2 demeure le concept le plus utile, le plus social et le plus affectueux. C’est le robot que le public, considéré comme potentiel usager, souhaiterait adopter. Aibo, le robot chien est le robot le plus futuriste tandis qu’Actroid, l’androïde est le plus esthétique.
Cet observatoire sémantique a démontré que l’image du robot et ses caractéristiques formelles influencent un scénario et un contexte d’usage. Un écart entre les fonctions perçues et les fonctions réelles est également mis en lumière (Rabardel, 1995).
Ainsi, les robots pourraient-ils révéler un nouveau type de relation outrepassant les représentations fictionnelles ? Selon Armand Hatchuel (2006) le designer intervient judicieusement sur le passage de l’objet connu à l’objet inconnu, ce qu’il nomme la « logique de pointe ». En effet, au-delà de l’esthétique du robot, il s’agit bien de créer de nouvelles identités, cela suggère par là même d’autres façons de penser, d’interagir, de créer de nouvelles pratiques.
Nous nous focaliserons sur l’enquête de qualification relative au robot Aibo, le robot désigné le plus sympathique, le plus serviable, le plus contrôlable parmi les huit concepts évalués, et sur les expérimentations graphiques afin de démontrer les possibles d’une relation amicale.
La deuxième enquête a été effectuée au Centre des Sciences de Montréal selon la méthode du Kansei Engineering (Nagamashi, 1971) auprès d’un panel majoritairement montréalais. Elle demandait au panel de qualifier Aibo en trois phases et à chaque étape : 1. Observation du robot à l’état inerte ; 2. Démonstration du robot par son maître ; 3. Interaction directe du panel avec le robot. Au-delà de l’évaluation comportementale, nous nous intéressons au bénéfice vécu durant l’interaction. Aibo est-il attractif, divertissant ou affectif ? Génère-t-il une conversation ? Les résultats ont démontré que le divertissement produit par l’interaction augmente les capacités d’acceptation du robot : des sentiments d’appropriation et d’affect apparaissent. L’interaction avec le robot est ressentie comme une bienveillance.
- Note de bas de page 14 :
-
« The boxing hares on cross », sculpture, 1985. Dans le bronze, les lièvres deviennent bavards et terriblement vivants.
Les relations de l’homme à l’animal renvoient aux relations de l’animal à la machine et ne cessent d’interroger la question du statut de l’humain. L’apport de Dominique Lestel dans son essai sur l’animalité (1996), invite à se demander si la référence au bestiaire a une fonction de décodage qui intégrerait la robotique étrangère et inquiétante dans un système significatif dont la référence centrale est humaine. Il s’agit d’analyser les productions contemporaines arborant la fabrication d’être artificiels animalisés susceptibles d’interpeller l’utilisateur dans un rapport d’amicalité. Ainsi, le robot chien Aibo est-il en mesure de révéler à travers diverses postures une sensibilité équivalente aux lièvres de Barry Flanang sculptés dans le bronze14 ? Aibo pourra alors apparaître aux côtés des portraits de personnages de l’histoire, tel un chien aux pieds de son maître.
- Note de bas de page 15 :
-
A l’inverse de l’univers inamical des personnages de Murakami.
Cette mise en abyme des robots confronte un bestiaire contemporain provenant d’univers différents (commerciaux, artistiques et culturels : Hello Kitty (Sanrio, 1976), Artoyz (Urban Vinyl, 1999), Aibo (Sony, version 2006), Furby (Hasbro, 1998), Juicy Salif, Stern cell (Piccinini, 2002). Les robots ont donc été interrogés, décortiqués, expérimentés plastiquement par le biais de photomontages et d’animations dans l’idée sous-jacente d’interroger leur sens et leur cohérence. Ces décentrements esthétiques et sémantiques ont permis de cerner des dimensions grotesques, extravagantes, frénétiques, fictionnelles, dimensions au sein desquelles une espèce d’objet amical émerge15. Le concept d’amicalité prend alors tout son sens dans cet univers multi-dimensionnel, entremêlant des univers issus de la fiction et de la réalité.
- Note de bas de page 16 :
-
En référence à Bernard Lafargue (2004), qui utilise les termes de nymphes-fœtus-animal-jouet pour désigner les boudchous de Piccinini : Still life with Stern Cells, 2002, Biennale de Venise.
Les robots de compagnie entrent dans une typologie singulière intelligible au sein de cette production foisonnante. Ils posent les bases d’une classification plus vaste : une espèce amicale de jouets-animaux-robots16 sophistiqués destinés aux adultes que nous nommons les jouets expérientiels. Dans un contexte social qui autorise le pouvoir de revendiquer le plaisir individuel (Lipovesky, 2006), la création de jouets expérientiels est alors légitime. Cet objet d’étude favorise une expérience virtuelle bénéfique : le rapport au robot devient expérientiel (Shredoff, 2002 ; Brown, IDEO).
3. Expérimentation avec Aibo : une expérience bénéfique favorable à l’acceptation du robot
- Note de bas de page 17 :
-
Le panel volontairement composé à part égale des sexes masculin et féminin, est constitué d’une dominante de personnes entre 26 et 35 ans. 50 % est une population salariée, l’autre moitié est étudiante.
Cette deuxième enquête s’est déroulée au Centre des sciences de Montréal, avec un public recruté de manière aléatoire devant le Centre17. L’expérimentation s’est achevée à saturation des réponses, c’est-à-dire lorsque les répondants ont cessé d’apporter des informations supplémentaires. Ainsi, trente-trois répondants montréalais y ont participé.
Ce questionnaire est centré sur le robot chien Aibo. Il s’agit du robot le plus accepté, le plus extraordinaire, le plus serviable, le plus sympathique et le plus fonctionnel d’après notre première enquête de perception. Par ailleurs, c’est aussi le robot le plus accessible pour effectuer ce type d’expérimentation. L’expérimentation demande au panel de qualifier le robot en trois phases et à chaque étape, elle se déroule de manière systématique toujours dans le même ordre.
Dans un 1er temps, les répondants observent Aibo inerte. Les répondants sont installés devant une table, le robot est posé au sol.
Durant la 2e phase, l’animateur et maître d’Aibo au Centre des sciences, présente le robot, ses fonctionnalités et ses danses. Le robot chien réagit par mécanisme de feed back à la voix et aux gestes de son maître. Aibo module son état affectif, danse, jappe, demande à jouer. La présentation dure 10 minutes.
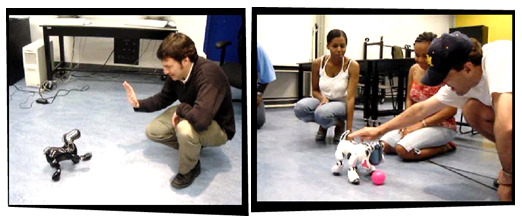
La 3e phase consiste à faire interagir le panel avec Aibo. Les répondants se placent devant la table et s’accroupissent à hauteur du robot pour interagir, jouer, expérimenter pendant 15 minutes. Cette dernière phase de l’expérimentation est enregistrée sous forme de vidéo numérique. La matière glanée constitue un support témoignant des interactions, elle offre un repérage supplémentaire permettant d’appuyer les résultats qualitatifs et quantitatifs.
- Note de bas de page 18 :
-
. Selon les préconisations de mesure de l’émotion de Peter Desmet (« Designing Emotions », Thèse de doctorat, Delf University of Technology, Pays Bas, 2002), les termes choisis relèvent de la perception/cognition, de la fonctionnalité, des sens/émotions, des comportements induits ou perçus, du rapport social.
- Note de bas de page 19 :
-
. Les questions libres sont identiques en phase 1 et en phase 3. Voici un échantillon des questions posées : À partir de cette démonstration, comment percevez-vous Aibo ? ; Que pensez-vous d’Aibo ? Décrivez votre sentiment par rapport à lui ; Quelles tâches lui confieriez-vous ? ; Etes-vous sensible à Aibo ? Seriez-vous prêt à l’adopter ? Selon vous, Aibo est-il susceptible de combler une présence ?
- Note de bas de page 20 :
-
. Échantillon des questions posées : À quoi pensez-vous lorsqu’on évoque le terme « robot de compagnie » ? Décrivez ce qui vous vient spontanément à l’esprit ; Connaissez-vous des robots de compagnie ? Si oui, lesquels.
- Note de bas de page 21 :
-
. La nature de la relation décelée ne peut émettre que des potentialités à développer, l’expérimentation menée étant limitée dans le temps, 30 minutes le temps de l’expérience. Les expérimentations mériteraient d’être poursuivies dans un contexte d’utilisation prolongée sur plusieurs mois.
Entre la 1re et la dernière expérimentation, le panel évalue ses impressions sur un différentiel sémantique (Osgood et al., 1957) sur une échelle de 7 valeurs et selon une valeur oppositionnelle18. Afin de notifier les changements de perception de l’objet inerte à l’objet animé, leur libre impression est évaluée sur la première et la dernière phase19. Seule la phase 1 pose des questions plus générales dans le but de s’informer du degré de connaissance du panel à propos des robots de compagnie20. L’approche est donc progressive et guidée. Ces étapes visent à vérifier si l’animation du robot influe sur son appréciation et à qualifier la nature de la potentielle relation21.
En préambule, 70 % des personnes interrogées ne présentent pas de crainte par rapport au robot.
En phase 1, à la question « Quelles tâches confieriez-vous à Aibo ? » 50 % répondent des activités de divertissement et un tiers des tâches ménagères. En phase 3, les réponses stéréotypées autour des tâches domestiques ont disparu au profit de la surveillance.
Lors de la 3e phase, 95 % du panel affirme qu’Aibo est divertissant.
Les résultats de l’enquête entre la phase 1 et 3 font apparaître deux points révélateurs :
-
le divertissement généré par l’interaction (phase 3) augmente les capacités d’acceptation du robot. Le divertissement est une valeur exponentielle de l’affect, il déclenche des sentiments d’appropriation et d’affect ;
-
le sentiment de présence est ressenti comme une bienveillance. Cet élément favorise l’acceptation du robot.
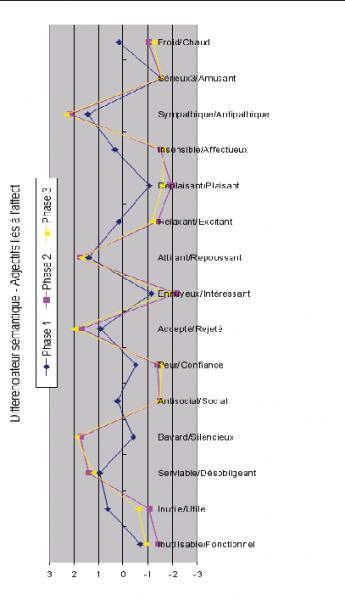
Au regard du différentiel sémantique (figure 2), la croissance de l’évaluation vers des points positifs est effective en phase 2 et 3. Dès lors, l’animation du robot met essentiellement en valeur six adjectifs oppositionnels : actif, utile, bavard, affectueux, social, naturel. L’importance de cette progression indique le basculement vers l’état actif du robot. L’analyse révèle deux qualités indispensables au robot : Aibo doit capter l’attention et surprendre l’usager. Ces éléments accroissent le potentiel divertissant. Le caractère imprévisible d’Aibo entretient un défi pour l’usager et captive l’intérêt.
Figure 2. Différentiateur sémantique, adjectifs choisis liés à l’affect
D’après Cziksentmihalyi (1990), le challenge implique une stimulation intense durant l’expérience, il contribue à installer des conditions optimales expérientielles favorisant le bien-être de l’être humain. C’est dans la désobéissance que le robot interpelle l’usager, il capte son attention et le stimule. Pour l’usager, le défi est lancé : « se faire obéir ». En visionnant les vidéos de repérage de l’expérimentation, il est aisé de constater qu’une émulation est créée entre les répondants. Même s’ils ne se connaissent pas, c’est à celui qui parviendra à se faire obéir. De la sorte, lorsqu’Aibo désobéit, le challenge de l’usager consiste à se faire obéir tout en s’amusant. C’est la raison pour laquelle Aibo désobéit mais pas toujours. Maintenir l’attention par le divertissement ou la curiosité est un facteur d’attraction. Certaines personnes vont même jusqu’à évoquer une fragilité ressentie pour Aibo : « il faut faire attention à lui », « il est petit donc il semble avoir besoin de protection ». Aibo exprime un besoin d’attention envers l’usager. Ces résultats prouvent que l’usager réclame un besoin de responsabilité face à ce nouvel objet animé. L’utilisateur dispose donc d’un rôle et d’un sentiment de responsabilité face au robot.
D’une part, le contact physique et l’interaction directe favorisent l’acceptation du robot. D’autre part, l’amusement introduit un climat bon enfant et confiant. Une qualité qui pourrait être palliative au sentiment de solitude. Ce climat serein encourage l’interaction et la fabrication d’espace transitionnel vers une relation d’amicalité.
Sur le différenciateur sémantique, la valeur « utile » reste une des progressions les plus importantes en phase 3. L’implication de l’usager conditionne l’utilité d’Aibo, la complicité se développe en fonction des besoins manifestés par le robot. Aibo valorise l’utilisateur en le responsabilisant quant à sa présence, il prend toute son humanité en présence du panel. Ce dernier lui accorde cette métaphore au-delà de l’animalité, vers une expression de vie. Aibo exhibe sa part humaine parmi les humains lorsque ceux-ci veulent bien lui attribuer ce statut. D’ailleurs la notion d’affect germe durant la dernière phase de l’expérimentation au cœur d’un divertissement installé. En dernière phase, le panel manifeste la volonté d’investir cet être artificiel d’une notion d’humanité. Cette sensibilité humaine (sentie par les métaphores conceptuelles qu’on lui attribue, telles que « attachant, attirant », « sensible », « il faut faire attention à lui », etc.) est livrée seulement parce que l’usager investit le robot d’une valeur humaine, finalement, pour y percevoir ce qu’il souhaiterait, un reflet de lui-même, un imago.
Figure 3. Phase 3, expérimentation menée au Centre des sciences de Montréal, mai 2006

En fin d’expérimentation, l’interaction entre le panel et Aibo a un impact direct sur le rapport cognitif au sujet et améliore l’expérience. Les tâches du robot sur la surveillance de la maison viennent conforter la notion de compagnie et de présence. Le panel emploie le terme « surveiller », il accorde une notion de contrôle et/ou de bienveillance à Aibo.
La notion de présence divertissante est aussi évoquée derrière l’idée d’interaction : « on peut facilement perdre du temps avec lui. Il est intéressant de le/la connaître. », « il nous fait oublier momentanément ce qu’il se passe […] », « sa présence convoque le jeu et l’attraction […] ». L’interaction directe avec l’usager vient éveiller l’affectivité. Durant l’expérience, une personne pose la question : « Aibo, est-ce que tu m’aimes ? » L’activité créée par le robot chien renvoie au sentiment de présence artificielle, un reflet permettant de combler la solitude. Selon Donald Norman, l’affectivité positive éveille la curiosité et met en condition le cerveau pour un apprentissage efficace (Norman, 2004, 38).
- Note de bas de page 22 :
-
Ce point reste source d’interrogations : pour quelles raisons le panel confierait le robot à des personnes plus fragiles et ne les utiliserait pas lui-même ? La télécommande, initialement conçue pour les personnes à mobilité réduite ou handicapées, a bien été détournée, l’industrie a permis à une population de masse de s’en emparer. Ce détournement se reproduira-t-il dans le cas des robots de compagnie ?
Le concept de présence distrayante et bienveillante accroît la confiance envers le robot au point d’accepter de lui confier les personnes les plus fragiles : enfants, personnes âgées ou en difficulté sociale22.
- Note de bas de page 23 :
-
L’esthétique cute concerne les caractéristiques morphologiques relevant du « mignon » : une tête arrondie et disproportionnée, des membres courts et épais, de grands yeux, etc. Ces attributs sont liés aux déclencheurs innés humains, ils s’incarnent principalement chez Walt Disney ou dans la tendance japonaise kawaii (Gomarasca, 2002). Infra, 97.
Des répondants, 75 % considèrent Aibo capable de combler une présence et le perçoivent aussi comme un être à part entière avec un « caractère vivant », « une conscience propre ». L’enquête dégage une notion de « présence artificielle » dès qu’Aibo est en interactivité directe. Pour 55 % des sondés, le robot chien déclenche une sensibilité par le biais de sa morphologie dans un premier temps : une esthétique cute23 qui fait appel aux déclencheurs innés (Lorenz, 1970) tel que l’explique le concepteur du soft d’Aibo, Frédéric Kaplan (2001). Cette sensibilité s’avère valorisée en phase 3 (80 %) par son comportement réactif et sa désobéissance, qui le rapproche d’un être vivant vers l’insaisissable.
Ces résultats amènent à nous interroger sur la consistance de ce reflet, une question effroyable : l’imago, le reflet du maître à travers une ombre, l’image d’une image de chien, un souffle. À propos du téléphone portable, omniprésent dans nos vies quotidiennes, l’anthropologue et philosophe Benasayag et la sociologue Del Ray précisaient : Notre époque est à proprement parler malade de ce premier niveau de solitude. Nos contemporains ont besoin de se procurer des mécanismes divers et variés de feed-back permanent qui leur permettent d’exister sans tomber dans leur propre vide intérieur. (Benasayag et Del Rey, 2006, 65). Aibo pourrait alors s’inscrire dans ce champ par le biais de son mécanisme de feed-back, un retour rassurant qui témoigne à l’usager de son existence.
Cette expérimentation intègre le robot dans un espace physique existant et humain. L’humain, quant à lui, intègre un espace virtuel grâce au robot. Dès lors, quelle histoire, quelle identité le robot interroge-t-il ?
4. Typologie de l’amicalité : approche poïétique
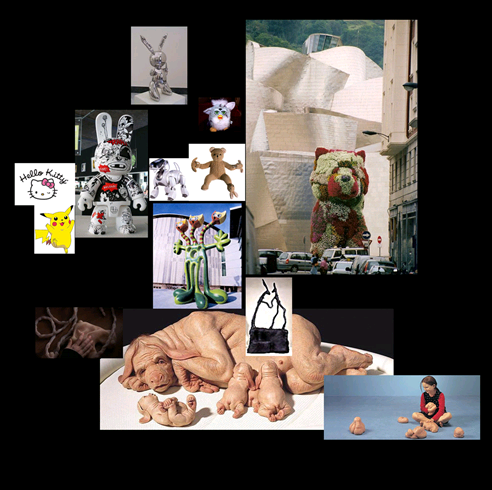
Cette partie pointe une volonté de décentrement de notre objet d’étude et veut sortir d’une vision progressiste et d’une gadgétomanie focalisée sur la technologie. À partir d’un travail sur les productions contemporaines artistiques, notre regard se veut neuf, riche et créatif, il ouvre sur une poïétique (Aristote), un champ exploratoire qui bouscule et décloisonne les frontières disciplinaires intégrant la multi-dimensionnalité des robots. Ici, nous nous sommes limités à étudier des productions plastiques et commerciales générant une apparence amicale et distrayante (jouet\compagnon, figure 4).
Figure 4. Tableau de travail du bestiaire amical
- Note de bas de page 24 :
-
Still Life With Stern Cells, Biennale de Venise, 2002.
La divergence d’origine des productions « amicalisantes », qui sont autant commerciales, que des œuvres d’art, des installations, des jouets, des animaux, des peluches, met en lumière la multitude de syntagmes possibles, ceux-ci renforcent le sens initial de l’objet ou l’atténuent. Du lièvre de Barry Flanagan aux nymphes de Patricia Piccinini24 en passant par Hello Kitty (Compagnie Sanrio, 1976), les Artoyz, Aibo (Sony, version 2006), Furby (Hasbro, 1998), Juicy Salif ou encore Pikachu (Shatoshi Tajiri, 1997), ces productions présentent des liens de lecture commune et des valeurs interchangeables.
Il ne s’agit pas d’une confusion des genres, c’est-à-dire de placer volontairement toutes ces productions dans la même catégorie par simplification mais bien de les mettre en tension. Ces artefacts sont des pets, des animaux de compagnie artificiels provenant d’univers fictionnels divers. La multiplicité des supports d’apparition (jeux vidéo, dessins animés, peluches, œuvres d’art, produits dérivés) accroît leur ubiquité. En effet, l’introduction de ces représentations dans des espaces ordinaires favorise une surconsommation de leurs images, ce qui familiarise ces objets dans une dimension plurielle et multiculturelle. Ces êtres artificiels prolifèrent de manière frénétique jonglant avec une multitude de concepts : kitsch, kawaii, technologie, sensibilité, infantilité, biotechnologie, éthique, croyance animiste et mythe pygmalionniste. Ce corpus multidimensionnel n’inclut pas systématiquement la technologie. Il touche une large cible des enfants aux adultes. Leur statut et leur fonction nous interroge alors : doudous artificiels ? Œuvres d’art ? Objets industriels ? Espèce d’objets artificiels : jouets-animaux-robots ? Ces productions sont-elles interchangeables d’un espace à un autre ? Un Aibo pourrait-il s’exposer au Palais Royal ? Un Aibo est-il un Tamagotchi tridimensionnel ou encore un Nintendo Dog, version luxe ? La figure iconique du chien peut-elle être substituée par un Aibo dans un portrait traditionnel ?
À travers ses figures du bestiaire, deux sphères se confrontent. L’une relève du kawaii et manifeste des éléments caractéristiques du cute. Ce que cette iconographie entend signifier est un univers social idéalisé et convivial dans lequel les hommes, les animaux et les choses sont infiniment heureux et gentils les uns avec les autres. (Gomarasca, 2002, 37). Le jouet dans son rapport à l’enfance entame la conversation dans l’animisme enfantin. L’autre affiche un désir de conversation dans l’ambiguïté, avec un aspect qui interroge le regardeur. Dans les deux cas, l’objet adopte le rôle d’un agitateur d’idées, il bouscule les codes des créations classiques par l’excès, l’extravagance kitsch mais surtout par son mode de fonctionnement transitionnel, par sa valeur existentielle.
Figure 5. Ressemblance et dissemblance du bestiaire
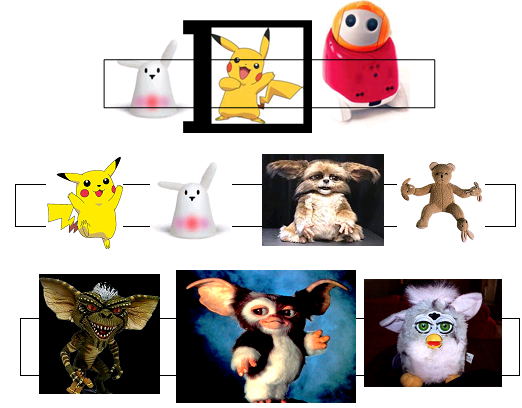
Les critères étudiés participent à identifier l’objet : lieux d’apparition, histoire, références formelles, les univers impliqués et les déplacements possibles. La différence des univers dans lesquels nous avons choisi ces objets d’étude expose le paradoxe de ces analogies et leur statut équivoque : œuvres d’art, jouets, animaux ? Ainsi les robots animalisés tels qu’Aibo ou Nabaztag naissent au cœur de cette ambiguïté, ils se distinguent mal de Puppy ou encore de Pikachu et reflètent les mêmes traits esthétiques et physiologiques. Ils apparaissent sur un support différent et ils n’ont pas d’histoire mais ils intègrent parfaitement bien ces univers entremêlant kawaii, manipulations génétiques et mythe du golem, ces univers s’insèrent aisément dans une objectalité amicale. Ils forment une unité dans un rapport ludique, sympathique, parfois poétique et souvent excessif.
Nous proposons ici un extrait de la série expérimentale de photomontages, elle travaille sur la signification produite et questionne la création d’univers susceptibles de construire du sens et d’établir le fonctionnement d’une typologie commune. Les similitudes et les dissemblances esthétiques et morphologiques de cette faune artificielle (figures 4 et 5) interrogent leur mise en scène et les conditions qui amènent à un regard sensible.
- Note de bas de page 25 :
-
Par valeur existentielle, nous entendons les expériences possibles de l’objet : lorsqu’il pénètre divers univers, il réalise de nouveaux syntagmes, prend un sens complémentaire et adopte une nouvelle identité. Potentialités artistiques, culturelles, fictionnelles du robot : une nouvelle lecture plus riche, plus intime, historique, plus esthétique, plus domestique…
- Note de bas de page 26 :
-
Jeff Koons à Versailles 2008-2009.
Notre propos, inscrit dans le champ du design et de l’étude des représentations, nous permet de redéfinir le robot dans diverses situations et de tester sa valeur existentielle25. Dès lors, à la manière de Jeff Koons26, nous mettons en abîme les icônes traditionnelles face à des icônes de la sculpture contemporaine ou des productions kawaii commercialisées.
Aibo s’immisce aux pieds de la Comtesse (figure 6) et interroge les représentations modernes dans une réflexion autour de l’anthropologie contemporaine.
Sur « Paysage de paradis avec l’Arche de Noé » (figure 7), les jouets-animaux-robots s’érigent au milieu des espèces animales dans une patrimonialisation, comme un trésor de notre civilisation. Dans une transversalité artistique et à travers une mise en scène ludique, cette démarche poïétique fabrique un univers de référence : les robots s’inscrivent dans une histoire au sein d’une typologie qui fait sens. Nous renversons les codes de la peinture traditionnelle, en choisissant d’immiscer ces jouets-animaux-robots sous un ciel doux et nuageux de Toussaint, dans ce jardin de la Genèse Parasha Noah. Par le biais de ce photomontage, le corpus de jouets-animaux-robots est à la naissance d’une espèce qui vise à s’épanouir et à se développer dans la modernité. À travers cette pratique graphique, ce corpus s’identifie sous un angle pluriel et fonctionne dans des univers cohérents. Ces univers ne sont pas uniquement cute, surabondants, excessifs, exagérés, ils peuvent exprimer poésie et sensorialité... Les jouets-animaux-robots se trouvent dans une atmosphère aimable, ils ré-enchantent les sphères contemporaines et historiques artistiques.
Figure 6. Ressemblance et dissemblance du bestiaire
« La Comtesse d’Egmont Pignatelli en costume espagnol et Aibo », 2009, revisité par Stéphanie Cardoso, photomontage. d’après la peinture originale d’Alexandre Roslin : La Comtesse d’Egmont Pignatelli en costume espagnol, 1763. The Minneapolis Institute of Art

Figure 7. « Paysage de paradis des jouets expérientiels : l’arche de Noé d’un bestiaire amical », 2009, revisité par S. Cardoso.
Tableau original de Jan Brueghel l’Ancien, (1568-1625) « Paysage de paradis avec l’arche de Noé »

Ces décentrements esthétiques ont permis de mettre en lumière des univers visuels à travers lesquels les robots prenaient tout leur sens. Ces constructions plastiques et sémantiques entremêlent des univers issus de la fiction et de la réalité. La mise en tension de sphères divergentes autour d’un rapport d’amicalité avec l’humain, conforte l’idée de fabrication d’une espèce objectale. Ces univers ne sont pas uniquement cute, surabondants, excessifs, ludique ou kitsch, ils peuvent exprimer poésie et sensorialité… Les robots y apparaissent dans une introduction à la compagnie artificielle, à l’amicalité, et non pas en tant que prétexte technologique magique susceptible de répondre à tous nos maux.
La typologie des jouets expérientiels naît alors dans une poétique, une esthétique qui euphorise l’objet. Nous utilisons le terme « jouet » pour les désigner car les robots comme les pets n’ont pas de fonctionnalité instrumentale. Le terme « jouet » est sans doute intermédiaire et nécessaire dans l’acceptation progressive des robots, par ailleurs il inclut un public adulte destiné à se familiariser avec ces objets dans un souci de dé-complexification. Ce sont des objets qui favorisent le divertissement, l’expérience bénéfique et multidimensionnelle, ils proposent et génèrent des expériences variées. Les scénarii prennent sens dans ce foisonnement de jouets expérientiels.
En mettant en adéquation les résultats des enquêtes menées à ces expérimentations, l’amicalité se révèle être le point de compatibilité (Ryan, 1991) qui réunit le dualisme des univers fictionnels et réels. L’expérience visuelle, émotionnelle, interactive est privilégiée, elle fait partie du projet design. La fabrication d’images fait vivre le robot (objet nouveau) dans différentes sphères entre réel et virtuel. Les univers réels/virtuels/fictionnels s’imbriquent les uns dans les autres. Ce chevauchement favorise la création d’espaces transitionnels : un environnement intermédiaire où l’usager, le regardeur ou le spectateur trouve sa place dans le scénario à créer. Un aller-retour entre réalité et fiction s’avère nécessaire à la construction de l’identité des robots en Occident.
Dans notre réflexion autour de l’amitié, le transitionnel amène à une intimité et à une complicité avec le robot.
5. Conclusion
Définir la potentialité de nos rapports aux robots de compagnie dans la dimension quotidienne nécessite d’interroger leur inscription et leur sens dans un contexte culturel occidental. Et si un robot chien n’était pas systématiquement destiné à faire le ménage et à lire les emails mais à entamer une conversation avec l’usager ? En posant un nouveau regard sur ce corpus, cette recherche a exploré les possibilités d’une relation d’amicalité parcourant les univers fictionnels, virtuels et réels intrinsèques au robot.
La question des relations face aux robots de compagnie soulève une vaste problématique devant la volonté de commercialisation auprès du grand public des firmes nationales et internationales. Elle admet une acceptation culturelle dans la diffusion, la communication et l’usage de ces productions essentiellement venues d’Extrême-Orient. La complexité et la réversibilité des robots largement stéréotypés dans le cinéma de science-fiction occidental imprègne les mentalités et façonne l’image de la robotique.
Cette étude propose par le biais de décloisonnements disciplinaires et de décentrements esthétiques une perspective poïétique.
Dans une démarche originale et empirique, il a été question de déceler les potentialités affectives et sociales qui permettaient de construire une relation d’amicalité.
L’enquête de perception a distingué trois phases afin de mesurer les évolutions de perception du robot Aibo de l’état inerte à l’état animé en passant par la démonstration réalisée par le maître du robot. Au-delà de l’aspect morphologique et fonctionnel d’Aibo, ces trois étapes manifestent l’importance des interactions co-construites avec l’humain et influencent les degrés d’acceptation sociale du robot. En décortiquant chaque étape auprès du panel, le rapport au robot s’est construit progressivement, le panel a pu l’appréhender, l’observer, le voir à l’œuvre et l’expérimenter. Les résultats de cette enquête ont révélé deux points principaux :
-
l’activité de divertissement est un facteur de développement de l’affect ;
-
le sentiment de présence bienveillante favorise l’acceptation du robot.
Le divertissement, l’affect, la présence et la bienveillance sont autant de caractéristiques comportementales qui donnent de l’importance à l’usager, un effet de résonance qui permet à Aibo de devenir plus humain parmi les humains. Par son autonomie, sa faculté de capter l’attention et de surprendre l’usager, Aibo témoigne à ce dernier de son existence et finalement de sa propre humanité. Aussi, en s’introduisant dans la sphère des arts plastiques et de l’histoire de l’art par le biais des expérimentations plastiques, ces robots hyper-technologiques prennent une place sensible, esthétique, artistique. Par l’animal, la production plastique s’ironise d’une humanité déshumanisée où l’artificiel prend une place conséquente par rapport au vivant.
Cette étude formelle met en lumière la référence au bestiaire comme valeur bénéfique dans les rapports à l’humain, une complicité relevant de la représentation mentale des animaux domestiques : doux, gais, affectueux, fidèles. Valeur bénéfique qui n’est pas sans jouer du versant maléfique d’une société érigeant l’artefact au rang de l’animal (Aibo).
L’inscription des robots zoomorphes au sein de l’histoire de l’art et de l’art contemporain construit un récit et légitime leur valeur esthétique. Dans cette relation d’amicalité, les robots de compagnie deviennent alors des objets témoins de notre modernité dans une dimension anthropologique. Le rapport au robot de compagnie n’est donc plus instrumental et efficace mais expérientiel et bénéfique.
La partie esthétique a signifié la nécessité d’expérimenter plastiquement et sémantiquement ces objets afin de les comprendre et de les décloisonner d’une complexité technologique prégnante. Cette approche poïétique offre la possibilité de les envisager sous de nouveaux angles sensibles et sensoriels. Les expérimentations graphiques ont créé un dialogue artistique transversal car elles relient de manière complémentaire la dimension artistique au projet de design (Lafargue, 2007). Par la manipulation des représentations, ce travail positionne le design graphique en tant qu’élément indispensable dans la démarche de la construction et l’identification de l’objet nouveau : le jouet expérientiel.
À travers cette recherche, le process design s’est limité à la dimension exploratoire et expérimentale autour des valeurs et des signes invoqués par les robots de compagnie. Il a permis de dégager des unités de sens et de cohérence d’une nouvelle typologie d’objets dans un décloisonnement focalisé sur la notion de plaisir et d’échange amical avec l’usager.