L’ambition des technologies dites de « téléprésence » étant d’assurer une interaction à distance en « temps réel », la gestion des délais temporels constitue un enjeu de premier plan. Afin d’évaluer leur impact sur l’expérience de la présence d’autrui dans une situation d’interaction, nous avons repris le paradigme du croisement perceptif en situation minimaliste (Auvray et al., 2009), en introduisant des délais (300 ms et 600 ms) sur le déclenchement de la stimulation. Les participants déplaçaient un champ récepteur dans un environnement 1D avec pour tâche d’identifier l'avatar de l’autre, en le distinguant d’un objet fixe et d’un leurre mobile. Une stimulation tactile en tout-ou-rien les informait du contact de leur avatar avec un des trois objets. Les résultats montrent que l’introduction de délais s’accompagne de plus d’erreurs de discrimination et d’une détérioration notable des dynamiques d’interaction, appuyant l’hypothèse que les délais induisent une altération de l’expérience de la présence d’autrui.
The aim of so-called "telepresence" technologies is to enable a remote interaction in "real time", and the management of time delays constitutes a stake at the forefront. In order to evaluate their impact on the experience of the other’s presence in an interactional situation, we have taken up the perceptual crossing paradigm in a minimalist context (Auvray et al., 2009), and introduced delays (300ms and 600ms) on triggering the stimulation. The participants moved a receiving field in a 1D environment and the task was to identify the other’s avatar, distinguishing it from a fixed object and a mobile lure. An on-off stimulation informed them of the contact between their avatar and one of the three objects. The results show that introduction of delays induces more discrimination errors and a significant deterioration of interaction dynamics, supporting the hypothesis that delays lead to an alteration of the other’s presence experience.
1. Introduction : Présence à distance et délais
- Note de bas de page 1 :
-
Cf. Presence : teleoperators and virtual environments, MIT Press, 1992
- Note de bas de page 2 :
-
C’est-à-dire une interface à laquelle l’utilisateur répond comme s’il s’agissait de quelqu’un, un agent conversationnel par exemple : il ne répond pas à celui qui a programmé l’entité sociale mais à cette dernière directement
- Note de bas de page 3 :
-
Voir l’URL : http://ispr.info/ (consulté le 12 février 2018), également Witmer et Singer (1998), et Slater (2002).
L’ambition des technologies dites de « téléprésence » comme le téléphone, la visioconférence, la réalité virtuelle, est de permettre une interaction en temps réel avec quelqu’un ou quelque chose qui n’est pas « physiquement présent », et d’assurer par là une « présence à distance ». L’émergence de ces technologies a poussé les chercheurs à s’interroger sur la capacité à se projeter ou agir dans une autre dimension que celle relative à notre présence physique1. L’International Society for Presence Research définit ainsi la présence (terme raccourci de téléprésence) comme « l’illusion perceptuelle de la non médiation » : ce qui caractérise le sentiment de présence à distance, c’est d’abord la capacité à oublier le rôle de médiation que remplit la technologie, qui est alors soit invisible pour l’utilisateur, soit transformée en entité sociale2 (Lombard et Ditton, 1997). L’utilisateur a le sentiment (illusoire) de percevoir directement l’environnement distal, comme lorsqu’il perçoit son environnement proximal. Le sentiment de présence ne se réduit cependant pas à l’expérience de percevoir l’environnement ou une autre personne à travers un dispositif, mais correspond plutôt au sentiment d’y être (sense of being there), voire d’y être avec un autre (we are together), accompagné du sentiment que quelque chose est là (it is there)3.
- Note de bas de page 4 :
-
Pour une revue complète, voir Biocca, Harms, et Burgoon (2003).
- Note de bas de page 5 :
-
Selon Mead et Morris (1934), autrui est une construction symbolique, une abstraction à partir des indices issus de l’interaction (théorie de l’interactionnisme symbolique).
Le sentiment de présence diffère manifestement selon que l’on interagit à distance avec un objet inanimé ou avec un autre agent intentionnel. La présence sociale via les technologies est définie par certains auteurs comme contact social continu à travers l’espace et le temps par un accès multimodal (Brown et al., 2001 ; Biocca et al., 2003), c’est-à-dire une interaction impliquant des codes sociaux, dans un espace-temps commun. L’utilisation de médiations techniques pour accéder à distance à une autre personne semble de surcroît obéir à des modalités spécifiques par l’accessibilité sensori-motrice de l’autre incarné4. Le corps joue en effet un rôle clef en présentant les indices d’une intelligence ou présence qui l’anime (par des éléments de communication verbale et/ou non verbale)5. Lors d’une interaction médiée, l’enjeu est de comprendre le rôle constituant et habilitant que joue la technique : la présence suppose que la technologie puisse manifester l’intentionnalité de l’utilisateur, ainsi que celle de son partenaire, c’est-à-dire qu’elles soient perceptibles afin que tous deux soient capables d’agentivité et de contrôle coordonnés (Riva, 2009 ; Pacherie, 2006, 2008 ; Trevarthen, 2001).
Dans le cadre d’une théorie de la cognition située et incarnée conçue comme couplage entre un organisme et son environnement (Varela et al., 1993 ; O’Regan et Noë, 2001 ; Lenay, 2006), notre approche de l’expérience de la présence de l’autre est basée sur l’idée de « croisement perceptif ». On parle de croisement perceptif (CP) lorsque, dans une interaction, deux sujets sont amenés à se percevoir mutuellement en tant qu’activités perceptives tournées l'une vers l’autre. Dans un croisement de regard, par exemple, ce que je perçois ce ne sont pas les yeux de l’autre, mais précisément son regard : je vois qu'il me voit ; et qu’il voit que je vois qu’il me voit (et ainsi de suite). Le CP a un caractère de mise en abyme constitutif, où chacun a conscience d’être présent pour l’autre. La mise en place de ce genre de situation présuppose la capacité des deux sujets à synchroniser et coordonner leurs actions de manière à créer une forme de « proto-conversation » (Tomasello et al., 2005). Ce type de dynamique d’interaction constituerait une véritable « signature » de la présence d’autrui, et jouerait un rôle clef dans le sentiment de sa présence, à la différence d’un objet « inanimé », qui n’est pas capable de sentir, ni de sentir qu’il est senti (Auvray et al., 2009 ; Lenay, 2010 ; Lenay et Stewart, 2012 ; Deschamps et al., 2017 ; Kojima et al., 2017).
La méthode minimaliste (détaillée dans la partie 2 « Expérience ») développée par Lenay (2006) permet par ailleurs de mettre en évidence, en le décomposant, le processus par lequel se met en place cette conscience réciproque d’une activité perceptive dirigée vers soi. Elle nécessite pour chacun l’association entre un corps-propre (corps percevant), et un corps-objet (corps objectif, perçu) manifesté dans l’espace numérique en lien avec l’action perceptive. Le corps-propre est augmenté par l’interface qui me permet de percevoir, et doit être accompagné d’un corps-objet présent dans le monde. Ces deux facettes sont indissociables et constitutives de l’interaction, selon une dynamique temporelle spécifique.
- Note de bas de page 6 :
-
Savoir si le fait d’avoir conscience ou non de la présence d’un délai a un effet sur la capacité des sujets à maintenir l’interaction, et s’ils sont capables de s’y adapter, semble être une question importante mais que nous ne pouvons aborder ici.
L’expérience de la présence d’un autre individu, qui a sa propre temporalité, implique en effet des processus hautement dynamiques de synchronisation en rapport avec les dynamiques sensori-motrices mutuelles de l’interaction (Lenay et al., 2003 ; Murray et Trevarthen, 1985 ; Chafe et al., 2004). La présence de délais temporels, par exemple de décalages entre mon action et son effet (transmission de l’information), peut altérer le sentiment de présence en empêchant les individus de se synchroniser et de coordonner leurs actions pour interagir. Au téléphone, par exemple, la temporalité de l’interaction manifeste la présence « immédiate », synchrone, de l’autre agent : l’interlocuteur est là au bout du fil, il répond à ma présence et la conversation est menée par une dynamique comparable à celle d’une communication en face à face. Si un délai intervient dans l’interaction6, ce sentiment de présence est altéré : l’autre tarde à réagir, paraît ne pas entendre, ne semble plus être là (comme lors de duplex télévisés par transmission satellite avec un correspondant éloigné), et laisse place à une impression d'absence. La question se pose ainsi de savoir comment et à quel niveau le délai vient perturber l’expérience de la présence d’autrui.
Nous posons l’hypothèse générale que le sentiment de présence émerge d’abord par le type d’activité perceptive que chacun met en place lorsqu’il est confronté à une autre activité intentionnelle, selon un caractère de réciprocité constituant. Nous faisons donc l’hypothèse que les délais ont des conséquences négatives sur l’expérience de cette présence à distance lorsqu’ils modifient voire empêchent ce type d’interaction, en perturbant la capacité des sujets à percevoir l’activité intentionnelle de l’autre dirigée vers eux.
Pour tester cette hypothèse, nous avons réalisé une étude expérimentale de l’impact des délais sur les interactions et les performances de reconnaissance d’autrui, en reprenant le paradigme du CP en situation minimaliste (Auvray et al., 2009 ; Lenay et Stewart, 2012).
2. Expérience
2.1. Participants
Vingt-huit participants ont passé l’expérience, soit 14 binômes (13 femmes et 15 hommes), âgés de 21 à 25 ans et étudiants à l’UTC, contre des crédits de cours.
2.2. Dispositif
Nous avons utilisé un Module d’Interaction Tactile (MIT ; Image 1) développé dans notre laboratoire, composé d’une matrice de 16 picots Braille, pour créer une situation d’interaction tactile à distance entre deux participants dans un environnement virtuel partagé.
Image 1 : MIT (Laboratoire COSTECH)
Chaque participant contrôle un avatar (ou « champ récepteur ») avec sa souris dans un espace virtuel à une dimension (un segment de 600 pixels de long, bouclant sur lui-même). Lorsque l’avatar entre en contact avec un autre objet, les picots tactiles du MIT, placé sous l’index gauche, s’activent en tout-ou-rien. Les participants (installés dans deux pièces séparées) portent un casque sur les oreilles ainsi qu’un bandeau sur les yeux, et seul ce retour tactile les informe du contact de leur avatar avec un autre objet. Chaque participant peut rencontrer trois types d’objets qui ont la même taille et la même forme (8 pixels de long ; fig. 1) : l’avatar (A) de l’autre participant, un objet fixe (OF ; conservant toujours la même position dans l’espace virtuel, et que chaque participant est seul à percevoir), ainsi qu’un leurre mobile (LM).
Figure 1. Schéma de l’environnement virtuel 1D où les participants (P1 et P2) se déplacent. L’environnement étant une « boucle », lorsque les participants dépassent un bord, ils apparaissent de l’autre côté.
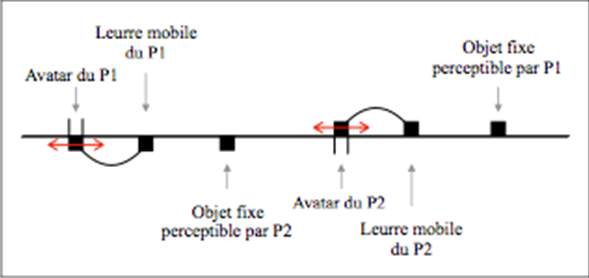
Le LM est un objet attaché par un lien rigide de 50 pixels de long à l’A de chaque participant, et se déplace donc avec lui, à la manière d’une ombre. Par principe, chaque participant ne peut jamais croiser (et donc percevoir) son propre LM. Ce dernier a exactement les mêmes trajectoires, et donc la même complexité dans ses déplacements, que l’A auquel il est attaché. Seulement, alors qu’un contact entre les deux A produit une stimulation chez les deux participants (le contact est mutuel), le contact entre un A et un LM ne produit de stimulation qu’à l’A : les participants ne peuvent pas sentir que l’on touche leur LM, et ne pourront donc pas réagir à ce contact. L’A peut percevoir et être perçu, le LM ne peut quant à lui qu’être perçu (c’est un simple « objet »). La seule manière de distinguer entre les deux objets mobiles (l’A de l’autre et son LM) est de s’appuyer sur la dynamique d’interaction : observer si l’objet réagit à cette rencontre, s’il répond aux sollicitations qui lui sont faites.
Plusieurs études utilisant ce paradigme ont montré que l’on pouvait, dans cet environnement appauvri, faire la différence entre un objet mobile et l’A d’un autre participant, en se coordonnant avec lui de manière à produire un CP (Auvray et al., 2009 ; Froese et Di Paolo, 2009 ; Froese et al., 2014 ; Deschamps et al., 2017). Pour que les stimulations reçues par le participant lors de l’interaction fassent sens, celui-ci doit pouvoir comprendre le lien de causalité entre son action et le retour de sensation associé. La perception d’un objet s’énacte par des lois de contingences sensori-motrices spécifiques, qui permettent à l’utilisateur d’extérioriser des percepts en attribuant ses sensations à la présence de quelque chose dans l’espace. Si les stimulations varient seulement en fonction des actions que je dirige vers l’objet extériorisé, alors il s’agit d’un OF. En revanche, si l’objet fait varier mes sensations indépendamment de mes actions, il s’agit d’un objet mobile. Les stimulations dues à l’autre sont alors reconnaissables à leur dynamique particulière, qui se coordonne pour répondre à ma présence et mes sollicitations (étant à la fois un corps percevant et un corps perçu). La temporalité semble jouer un rôle déterminant dans la capacité à déterminer s’il s’agit d’une chose ou d’un être animé.
2.3. Procédure
Les sujets étaient informés du fonctionnement du dispositif (une souris qui contrôle un A), et de la possibilité de rencontrer 3 types d’objets dans l’environnement virtuel via un retour tactile. La tâche de discrimination à effectuer leur était également expliquée. Une phase de familiarisation leur permettait de prendre en main le dispositif, en interagissant avec un objet fixe et un robot mobile à vitesse constante.
Pour évaluer l’impact des délais sur les performances de reconnaissance et les dynamiques d’interaction, nous avons comparé une situation d’interaction sans délai, dans laquelle les picots s’activent dès que le curseur rencontre un objet à l’écran (condition contrôle), à deux situations d’interaction avec délai, où le déclenchement de la stimulation est différé soit de 300 ms, soit de 600 ms par rapport à la rencontre effective de l’objet : la stimulation informe dans ce cas sur un événement qui a déjà eu lieu. À aucun moment les participants n’étaient informés de la présence de ces délais : l’on peut faire l’hypothèse qu’ils partaient du principe que les stimulations tactiles et l’événement qui les déclenche étaient simultanés, que les picots tactiles s’activaient dès que leur A entrait en contact avec un objet et aussi longtemps que ce contact était maintenu. La tâche des participants était de cliquer chaque fois qu’ils estimaient être en contact avec l’A de l’autre participant, et seulement avec celui-ci, autant de fois qu’ils le voulaient.
Les sessions d’interaction duraient 1 minute 30, avec 20 s de pause entre chaque session, en 2 phases de 3 sessions. L’ordre de présentation des différentes conditions était randomisé, selon deux groupes à mesures indépendantes. Nous avons enregistré le nombre de stimulations tactiles suite à un contact avec l’A de l’autre, le LM ou l’OF (s’il y avait un contact ou non toutes les 5 ms), le nombre de clics pour chaque objet, ainsi que les trajectoires perceptives. À la fin de l’expérience, chaque participant répondait à un questionnaire libre où il devait indiquer s’il avait perçu des changements entre les différentes sessions, décrire ses stratégies pour trouver l’autre, et celles utilisées par l’autre pour le trouver.
3. Résultats
3.1. Pourcentages de stimulations :
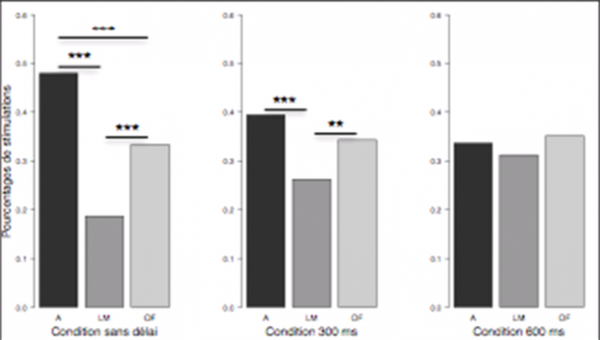
Nous avons mesuré le nombre de stimulations reçues par chaque participant suivant leurs causes et avons calculé leur répartition pour chaque objet. Les résultats de la condition sans délai reproduisent ceux de l’expérience d’Auvray et al. (2009) : une ANOVA, réalisée sur les pourcentages de stimulations (A, LM et OF), met en avant un effet principal significatif du facteur [F(2,81) =28.81 ; p < 0.001]. Un t-test révèle une différence significative entre les trois conditions du facteur (p < 0.001). La majorité des stimulations reçues par les participants (fig. 2) était due à la rencontre avec l’A (48 % ± 17.8), puis à la rencontre avec l’OF (33.3 % ± 14.3), puis avec le LM (18.7 % ± 10.2).
Pour la condition avec délai de 300 ms, on observe également un effet principal significatif du facteur [F(2,81) =9.377 ; p < 0.001], ainsi qu’une différence significative entre l’A et le LM (p < 0.001) et entre le LM et l’OF (p = 0.01), mais pas entre l’A et l’OF. La majorité des stimulations était due à l’A (39.5 % ± 12.5), puis à l’OF (34.3 % ± 12.9), puis au LM (26.2 % ± 8.6).
En revanche, aucun effet n’apparaît dans la condition avec délai de 600 ms, entre l’A (33.6 % ± 12.9), le LM (31.2 % ± 9.2) et l’OF (35.1 % ±
16.1).
Figure 2. Graphiques des pourcentages de stimulations en fonction de chaque objet, pour les trois conditions avec et sans délai.
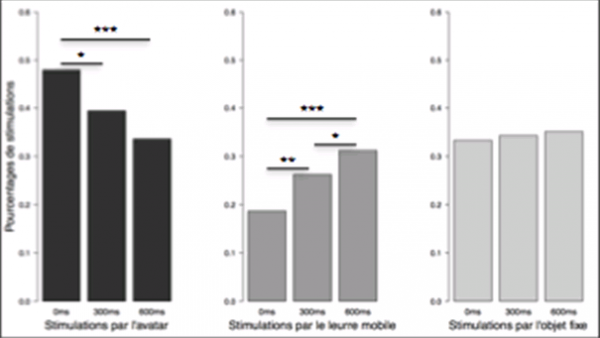
Une ANOVA sur le nombre de stimulations issues de l’A dans les trois conditions de délais (0 ms, 300 ms et 600 ms) révèle également un effet principal significatif du facteur [F(2,81) =6.826 ; p < 0.01]. Un t-test montre une différence significative entre les conditions sans délai et 600 ms (p < 0.001), et entre les conditions sans délai et 300 ms (p < 0.05), mais pas de différence entre 300 ms et 600 ms (fig. 3).
Concernant le LM, l’on observe un effet principal du facteur [F(2,81) =12.78 ; p < 0.001], ainsi qu’une différence significative entre les conditions sans délai et 300 ms (p < 0.01), entre les conditions sans délai et 600 ms (p < 0.001), et entre 300 ms et 600 ms (p < 0.05).
Enfin, aucun effet principal n’a été mis en avant pour les stimulations par l’OF entre les trois conditions.
Figure 3. Graphiques des pourcentages de stimulations en fonction de chaque condition avec ou sans délai, pour les trois objets.
Ces résultats tendent à appuyer l’hypothèse que la stratégie des participants pour discriminer autrui consiste à stabiliser un CP avec son avatar, qui provoque un plus grand nombre de stimulations par rapport aux deux autres objets, et selon la dynamique spécifique d’une réciprocité.
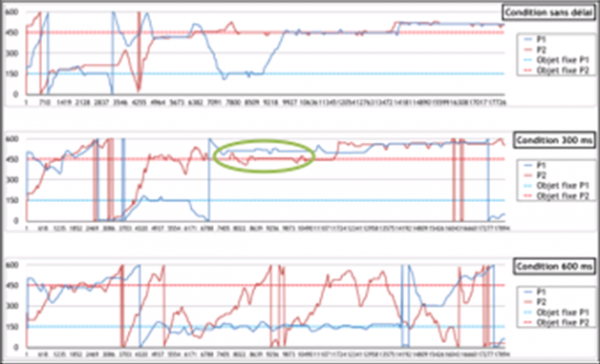
L’exemple des trajectoires perceptives enregistrées illustre cette « danse » ou « proto-conversation » où chacun répond à l’autre, manifestant sa présence en cherchant celle de l'autre. Cependant, l’introduction de délais trouble la mise en place d’un CP, et les stimulations tendent au nivellement jusqu’à ne plus manifester de différences en condition 600 ms : les sujets rencontrent une difficulté croissante à stabiliser une situation d’interaction privilégiée avec autrui (fig. 4). Nous reviendrons sur cette observation dans la partie 4 « Discussion ».
Figure 4. Trajectoires perceptives d’un binôme ayant réussi un CP en condition sans délai, et manifestant des difficultés à stabiliser l’interaction avec du délai. Les lignes en pointillés représentent la position de l’OF de chaque participant, et les lignes pleines les trajectoires perceptives des A (participant 1 (P1) en bleu, et participant 2 (P2) en rouge). Les LM ne sont pas représentés, mais peuvent être déduits, comme dans la condition 300 ms où le P2 explore son OF, alors que le P1 explore le LM du P2 (cf. rond vert). Les barres verticales représentent le passage d’un bord à l’autre de l’environnement.
3.2. Analyse de la cause des clics
Pour déterminer la cause des clics effectués par les participants, nous avons identifié l’objet ayant procuré le plus de stimulations dans les 2 s précédant le clic. Nous avons ensuite calculé la répartition, en pourcentages, des clics pour chaque objet.
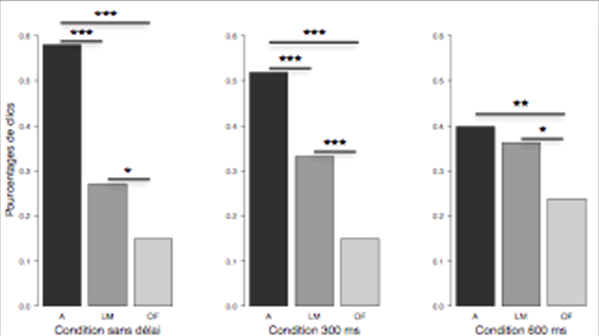
En condition sans délai, une ANOVA met en évidence un effet principal significatif du facteur cause des clics (A, LM et OF) [F(2,81) =29.09 ; p < 0.001]. Un t-test révèle des différences significatives entre les clics sur l’A et ceux sur le LM, et entre les clics sur l’A et sur l’OF (p < 0.001 dans les deux cas) ; ainsi qu’une différence significative entre le LM et l’OF (p < 0.05). La majorité des clics (fig. 5) était due à l’A (58 % ± 25.1), puis au LM (27.1 % ± 20.4), puis à l’OF (14.9 % ± 19.5).
Pour la condition 300 ms de délai, on observe un effet principal significatif du facteur [F(2,81) =30.87 ; p < 0.001], et des différences significatives entre les trois conditions du facteur (p < 0.001). La majorité des clics était attribuée à l’A (51.9 % ± 20.1), puis au LM (33.2 % ± 16.9) puis à l’OF (14.9 % ± 15.3).
Enfin, pour la condition 600 ms de délai, on observe également un effet principal significatif du facteur [F(2,81) =3.97 ; p < 0.05], et une différence significative entre les clics sur l’A et sur l’OF (p < 0.01), ainsi qu’entre le LM et l’OF (p < 0.05). Cependant, aucune différence n’est observée entre l’A et le LM : les participants ne différencient plus les deux objets mobiles. La majorité des clics était attribuée à l’A (39.9 % ± 24), puis au LM (36.3 % ± 21.2), puis à l’OF (23.9 % ± 21.6).
Figure 5. Graphiques des pourcentages de clics en fonction de chaque objet, pour les trois conditions avec et sans délai.
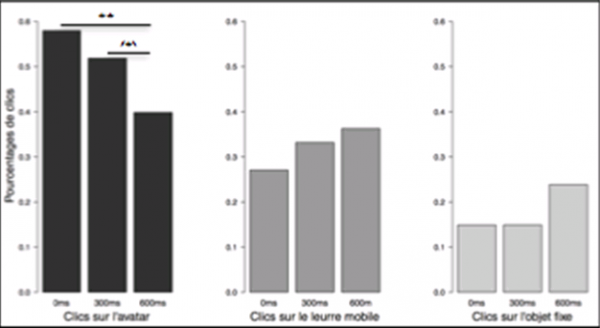
Une ANOVA sur le nombre de clics sur l’A dans les trois conditions de délais (0 ms, 300 ms et 600 ms) révèle également un effet principal significatif du facteur [F(2,81) =4.431 ; p < 0.05] ; avec une différence significative entre les clics sur l’A en condition sans délai et les clics en condition 600 ms (p < 0.01), et une différence tendancielle entre les clics sur l’A en 300 ms et ceux en 600 ms (p = 0.0562). En revanche, aucune différence significative n’a pu être établie entre les conditions sans délai et 300 ms.
Concernant les clics sur le LM et ceux sur l’OF (0 ms, 300 ms, 600 ms), nous n’observons pas d’effet principal du facteur (fig. 6).
Figure 6. Graphiques des pourcentages de clics en fonction de chaque condition avec ou sans délai, pour les trois objets.
Ces résultats montrent qu’en l’absence de délai, les sujets réussissent la tâche de discrimination. Ils sont capables de différencier un objet fixe d’un objet mobile (fig. 5 et 6) et surtout, de mettre en place des stratégies efficaces permettant de stabiliser une interaction avec autrui, et de le différencier de son LM.
Les sujets parviennent encore à réussir la tâche lorsqu’on introduit un délai de 300 ms, bien que leurs performances diminuent : le nombre de clics sur l’A tend à baisser tandis que celui sur le LM augmente, étant plus stimulés par le LM en 300 ms que dans une situation sans délai (fig. 3). La tendance se confirme en condition 600 ms, mais les différences restent significatives entre les clics sur l’OF et ceux sur les deux objets mobiles (l’A et le LM). Ces résultats peuvent manifester une certaine adaptation au délai : même en condition 600 ms, les sujets réussissent partiellement la tâche en sachant différencier un objet fixe d’un objet en mouvement ; ce qui est notable, puisque pour autant ils sont stimulés à peu près également par tous les objets en condition 600 ms (fig. 2).
4. Discussion
Les résultats précédents suggèrent que le délai influence les stratégies exploratoires, c’est-à-dire les lois de contingences sensorimotrices lors de l’interaction (O’Regan et Noë, 2001 ; Lenay, 2006). En effet, l’analyse des trajectoires perceptives montre que les sujets déploient des stratégies de réversibilité de l’action pour une perception fiable : ils inversent leur mouvement chaque fois qu’ils reçoivent une stimulation, afin de retrouver l’objet et osciller autour, ou s’arrêter dessus. L’action apparaît en ce sens essentielle à l’émergence de percepts structurés et à leur extériorisation (Lenay et al., 2003). Il s’agit de déterminer si l’objet rencontré est l’A, le LM ou l'OF, en extrayant des invariants non pas dans l’information sensorielle (ici réduite à une information binaire), mais dans les cycles sensori-moteurs. Les sujets énactent de manière contrôlée l’environnement, font advenir une perception sur la base d’une dynamique des stimulations qui prend un sens spécifique selon les objets.
- Note de bas de page 7 :
-
Merleau-Ponty Maurice (1964). Le Visible et l’Invisible, Gallimard, Paris, p. 268
Dans la condition sans délai, les résultats sont similaires à ceux de l’expérience princeps (Auvray et al., 2009) : les sujets parviennent à cliquer un plus grand nombre de fois sur l'A que sur le LM ou l’OF. La temporalité de leurs actions dans l’espace physique correspond à la temporalité de leur avatar dans l’environnement virtuel, et une stimulation tactile est toujours déclenchée à la même position dans le référentiel corporel et kinesthésique des sujets. Ainsi, les deux participants parviennent à stabiliser une situation d’interaction en coordonnant leurs actions (fig. 4), et à distinguer autrui du LM. Lors d’un CP entre les deux A, une forme d’accroche se met en place entre leurs activités perceptives, et la dynamique d’interaction qui se développe fait sentir à chaque participant l’attention que l’autre lui porte ; alors que le LM ne réagit pas aux sollicitations : il ne fait pas attention à eux. On peut dire avec Merleau-Ponty7 qu’« il n’y a pas seulement rivalité moi-autrui, mais co-fonctionnement », une coprésence sous forme de protoconversation, où se retrouve par exemple le principe du turn-taking (constitutif d’une expérience intersubjective, comme l’ont récemment montré Kojima et al., 2017).
- Note de bas de page 8 :
-
Husserl Edmund (1964). Leçons pour une phénoménologie de la conscience intime du temps, PUF, coll. « Épiméthée », Paris
Avec l’introduction de délais, les sujets rencontrent plus de difficultés à stabiliser une perception (observable à partir des trajectoires perceptives ; cf. fig. 4). Une partie de ces difficultés provient du fait que les utilisateurs, ignorant la présence du délai, continuent de faire usage de principes et de règles sensori-motrices qui ne valent que dans le cas où la stimulation tactile est simultanée au contact de leur avatar et de l’objet : les sujets n’amplifient pas leurs mouvements ou ne ralentissent pas pour compenser le délai. Lorsque leur A croise l’OF, n’ayant pas immédiatement de stimulation, ils poursuivent leur mouvement : quand la stimulation différée a lieu (300 ou 600 ms après le contact effectif), ils reviennent en arrière ; mais ne retrouvant pas immédiatement l’objet qu’ils viennent de croiser (et n’ayant aucune nouvelle stimulation témoignant de sa présence), ils pensent qu’il s’est déplacé. Ces résultats appuient l’idée que l’expérience de la présence des objets repose sur des attentes et une mémorisation des stimulations, qui correspond à l’analyse de Husserl8 affirmant que « toute perception a son halo rétentionnel et protentionnel ». La temporalité des sensations perçues semble être constitutive des caractéristiques de l’objet en question, de sa phénoménalité.
Les réponses aux questionnaires appuient cette analyse : les sujets, pour donner un sens aux stimulations dans les situations avec délai, évoquent l’impression que les objets ont changé de place, ou disparu, ou encore qu’ils sont plus grands. En effet, s’ils s’arrêtent sur un objet un certain temps, puis bougent et s’en séparent, la stimulation perdure à cause du délai, leur donnant l’illusion qu’ils sont toujours en contact. La perception de l’espace semble aussi être impactée par le délai, l’environnement virtuel où évolue leur avatar leur paraissant plus grand. Ils ont ainsi l'impression que ce sont les choses et l’environnement qui changent, mais n’évoquent pas l’idée que leur propre présence médiée dans l’environnement puisse être modifiée pour l’autre. Le délai semble ainsi avoir un rôle perturbant dans la constitution de notre perception des choses et de l’espace lors de l’utilisation de médiations techniques. Néanmoins, nous avons vu que les sujets réussissaient suffisamment à s'adapter au délai pour différencier l'OF des deux autres objets mobiles, même avec 600 ms de délai. Le problème crucial posé par le délai concerne alors spécifiquement la distinction entre autrui et le LM, donc le sentiment de présence d'une autre intentionnalité. C'est la phénoménalisation d’autrui comme tel qui est affectée.
- Note de bas de page 9 :
-
Sartre Jean-Paul (1943). L’Être et le néant, Gallimard, Paris, p. 299.
- Note de bas de page 10 :
-
Merleau-Ponty Maurice, op. cit., p. 268
Dans une situation sans délai, une sorte de dialogue se met en place entre les sujets tentant de s’objectiver mutuellement, par l’alternance des rôles sujet-objet : lorsque les sujets se sont trouvés dans l’espace, l’un s’immobilise afin de vérifier que les variations de sensations ne sont pas dues à ses actions (il est objet perçu pour l’autre), puis les rôles s’inversent. Cette « danse » du CP (ou turn-taking) peut être rapprochée de la description de l’épreuve d’autrui par Sartre9, comme phénomène qui ne se laisse pas objectiver, prétendant lui aussi constituer et objectiver en tant que conscience. Une relation dialectique doit se mettre en place par l’échange des rôles sujet-objet afin de faire émerger le sentiment de présence d’un autre sujet intentionnel, qui nous échappe : comme le dit Sartre, on ne constitue pas autrui, on le rencontre. Le sentiment de présence pourrait résulter de la perception d’autrui comme étant simultanément objet et sujet, un corps ayant et manifestant un monde propre, agi par une subjectivité. Lorsqu’il n’y a pas de délai dans une interaction, autrui est ce tout sujet-objet se jouant dans une temporalité telle, qu’un lien d’interdépendance est saisi entre ces deux composantes : il est simultanément ce corps que je perçois et cette subjectivité qui me perçoit, et qui perçoit que je le perçois. Au contraire, la présence d'un délai lors de l’utilisation d’une technologie impose un décalage (un diffèrement) entre la présence physique au dispositif, et la présence médiée dans l’environnement. En cas d'interaction, les temporalités des actions physiques (corps percevant) des deux sujets ne correspondent plus à la temporalité de leurs avatars (corps perçu). Leurs sensations tactiles prennent un sens ambigu car elles ne leur permettent plus de coordonner leurs actions. Le délai impacte l'accroche des dynamiques exploratoires et donc la perception de leur interdépendance (leur contingence). Lorsque je cherche à percevoir autrui dans une situation avec du délai, la temporalité des stimulations ne permet plus, ni de donner le sens de la consistance d'un objet, ni de réaliser l'accroche des activités perceptives qui donnerait le sens de la présence d'une intentionnalité. Dans un temps qui ne nous est plus commun, je ne parviens plus à saisir autrui comme ce tout sujetobjet qu’il est. Si lors d’une interaction sans délai nous avons pu dire avec Merleau-Ponty10 qu’« il n’y a pas seulement rivalité moi-autrui, mais co-fonctionnement », en revanche avec du délai il semble n’y avoir plus de « co-fonctionnement » possible entre les intentionnalités, mais seulement rivalité.
Comprendre l’impact des délais semble être capital dans le cadre des IHM en particulier pour les interactions interindividuelles à distance. Pour poursuivre cette recherche, il faudra vérifier la validité et la généralité de nos résultats pour des médiations plus complexes et plus naturelles que celles explorées dans le cadre minimaliste utilisé ici. Nous avons vu que c'est une chose de s'adapter au délai pour accéder à la perception d'objets qui, le cas échéant, seraient des traces d'autrui, mais que c'est autre chose que la perception de sa présence. La vraie difficulté est de percevoir un phénomène comme étant la trace de la présence d'autrui, et non seulement la présence de sa trace.
Pour cela nous prolongerons ce type d'étude expérimentale minimaliste sur l'influence variable de différents types de délais (délai sur la stimulation, sur l’action, ou sur la transmission) dans le but de mieux comprendre la façon dont s'articulent perception de l'avatar d’autrui, dynamique d’interaction et expérience de sa présence.